Raspberry Pi - Keypad - Servo Motor
Deze handleiding legt uit hoe u een Raspberry Pi en een keypad gebruikt om een servo motor te besturen. In detail:
- Wanneer een geautoriseerd wachtwoord wordt ingevoerd op het keypad, zal de Raspberry Pi de servo motor draaien naar 90°.
- Na een ingestelde tijd zal de Raspberry Pi de servo motor terugdraaien naar 0°.
De code voor de Raspberry Pi maakt het ook mogelijk om meerdere wachtwoorden te gebruiken.
Hardware benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Keypad en Servo Motor
Als u niet vertrouwd bent met het keypad en servo motor (inclusief pinout, functionaliteit, programmeren, enzovoort), kunnen de volgende tutorials u helpen:
- Raspberry Pi - Keypad tutorial
- Raspberry Pi - Servo Motor tutorial
Aansluitschema
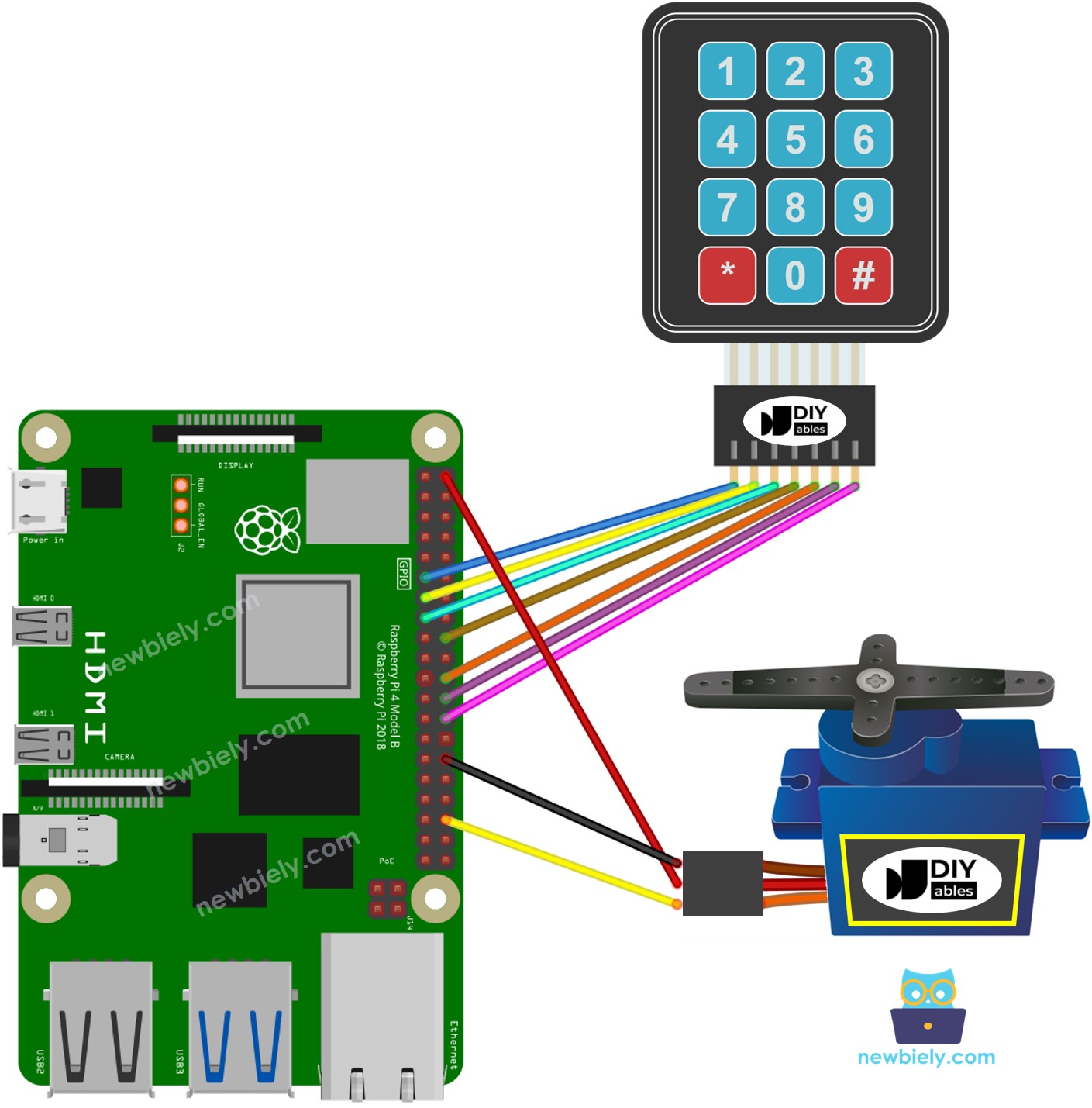
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
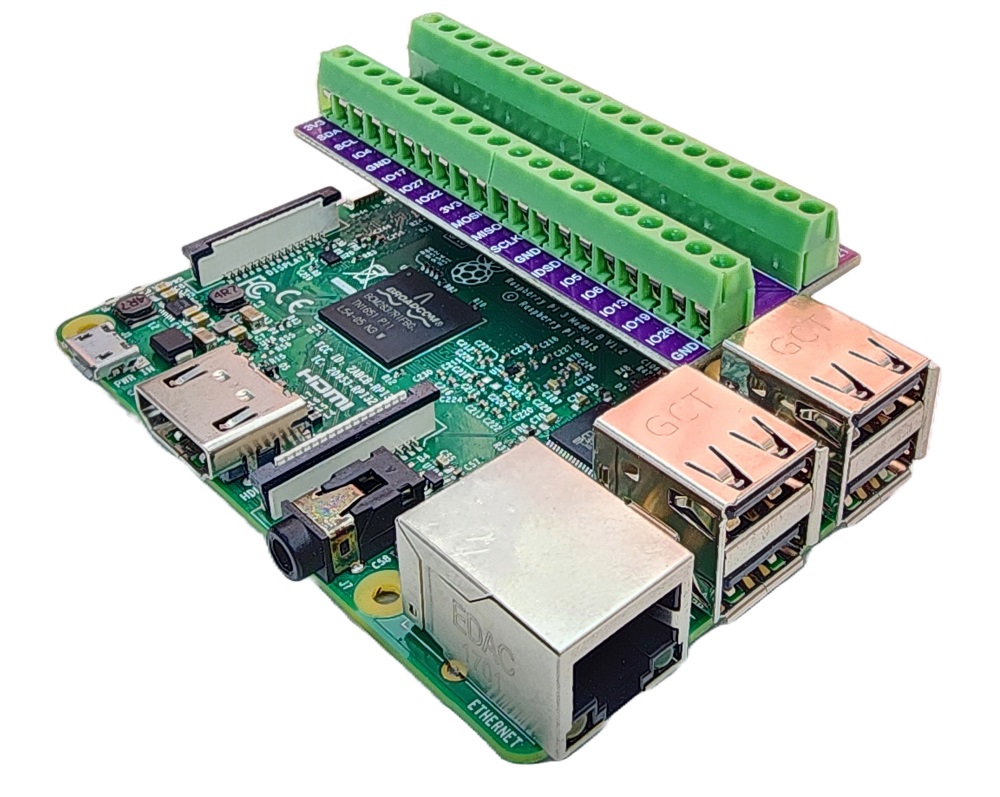
Om uw bekabelingsopstelling te vereenvoudigen en te organiseren, raden we het gebruik van een Schroevenklemaansluiting-shield voor Raspberry Pi aan. Deze shield zorgt voor veiligere en beter beheerbare verbindingen, zoals hieronder weergegeven:
Let op dat het hierboven getoonde aansluitschema alleen geschikt is voor een servo motor met laag koppel. Als de motor trilt in plaats van draait, moet u een externe voedingsbron gebruiken om meer stroom te leveren aan de servo motor. Hieronder wordt het aansluitschema getoond met een externe voedingsbron voor de servo motor.
TO BE ADD IMAGE
Vergeet niet om de GND van de externe voeding te verbinden met de GND van de Raspberry Pi.
Raspberry Pi Code - draait Servo Motor bij correct wachtwoord
Als het wachtwoord correct is, zal de servo motor worden ingesteld op 90° gedurende 5 seconden. Na deze 5 seconden wordt de servo motor teruggezet naar 0°.
Snelle stappen
- Zorg dat u Raspbian of een ander Raspberry Pi compatibel besturingssysteem hebt geïnstalleerd op uw Pi.
- Zorg dat uw Raspberry Pi verbonden is met hetzelfde lokale netwerk als uw pc.
- Zorg dat uw Raspberry Pi verbonden is met het internet als u bibliotheken moet installeren.
- Als dit de eerste keer is dat u een Raspberry Pi gebruikt, zie hoe u de Raspberry Pi instelt
- Verbind uw pc via SSH met de Raspberry Pi met behulp van de ingebouwde SSH-client op Linux en macOS of PuTTY op Windows. Zie hoe u uw pc verbindt met Raspberry Pi via SSH.
- Zorg dat u de RPi.GPIO bibliotheek hebt geïnstalleerd. Zo niet, installeer deze met het volgende commando:
- Maak een Python scriptbestand keypad_servo.py en voeg de volgende code toe:
- Sla het bestand op en start het Python-script door het volgende commando in de terminal uit te voeren:
Het script draait continu in een oneindige lus totdat u Ctrl + C indrukt in de terminal.
- Druk op 12345#
- Voer in 5642B#
- Bekijk het resultaat op de Serial Monitor en de positie van de servo motor.
Uitleg code
De geldige wachtwoorden zijn vooraf gedefinieerd in de Raspberry Pi code. Een string, genaamd input_password, wordt gebruikt om het door de gebruiker ingevoerde wachtwoord op te slaan. Op het keypad worden twee toetsen (* en #) gebruikt voor speciale functies: het wissen van het wachtwoord en het beëindigen van de invoer. Wanneer een toets op het keypad wordt ingedrukt:
- Als de ingedrukte toets geen van de twee speciale toetsen is, wordt deze toegevoegd aan het input_password.
- Als de ingedrukte toets * is, wordt het input_password gewist. Dit kan worden gebruikt om opnieuw te beginnen met het invoeren van het wachtwoord.
- Als de ingedrukte toets # is:
- Controleert de Raspberry Pi of het input_password overeenkomt met een van de vooraf gedefinieerde wachtwoorden, en zal de servo motor draaien naar 90°.
- Ongeacht of het wachtwoord correct is, wordt het input_password gewist voor de volgende invoer.
- Na een bepaalde tijd draait de Raspberry Pi de servo motor terug naar 0°.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten en helpt u het project stap voor stap te voltooien.