Raspberry Pi - Obstakel Sensor
Deze handleiding leert u hoe u de Raspberry Pi gebruikt met de infrarood obstakel vermijdingssensor. We zullen in detail leren:
- Hoe u de Raspberry Pi aansluit op de infrarood obstakel vermijdingssensor.
- Hoe u de Raspberry Pi programmeert om de status van de infrarood obstakel vermijdingssensor uit te lezen.
- Hoe u de Raspberry Pi programmeert om obstakels te detecteren.
Hardware benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over de IR Obstakel Vermijdingssensor
De infrarood obstakelsensor kan de aanwezigheid van een object voor zich detecteren door gebruik te maken van infrarood signalen. Het detectiebereik is van 2 cm tot 30 cm en kan worden aangepast met een ingebouwde potentiometer.
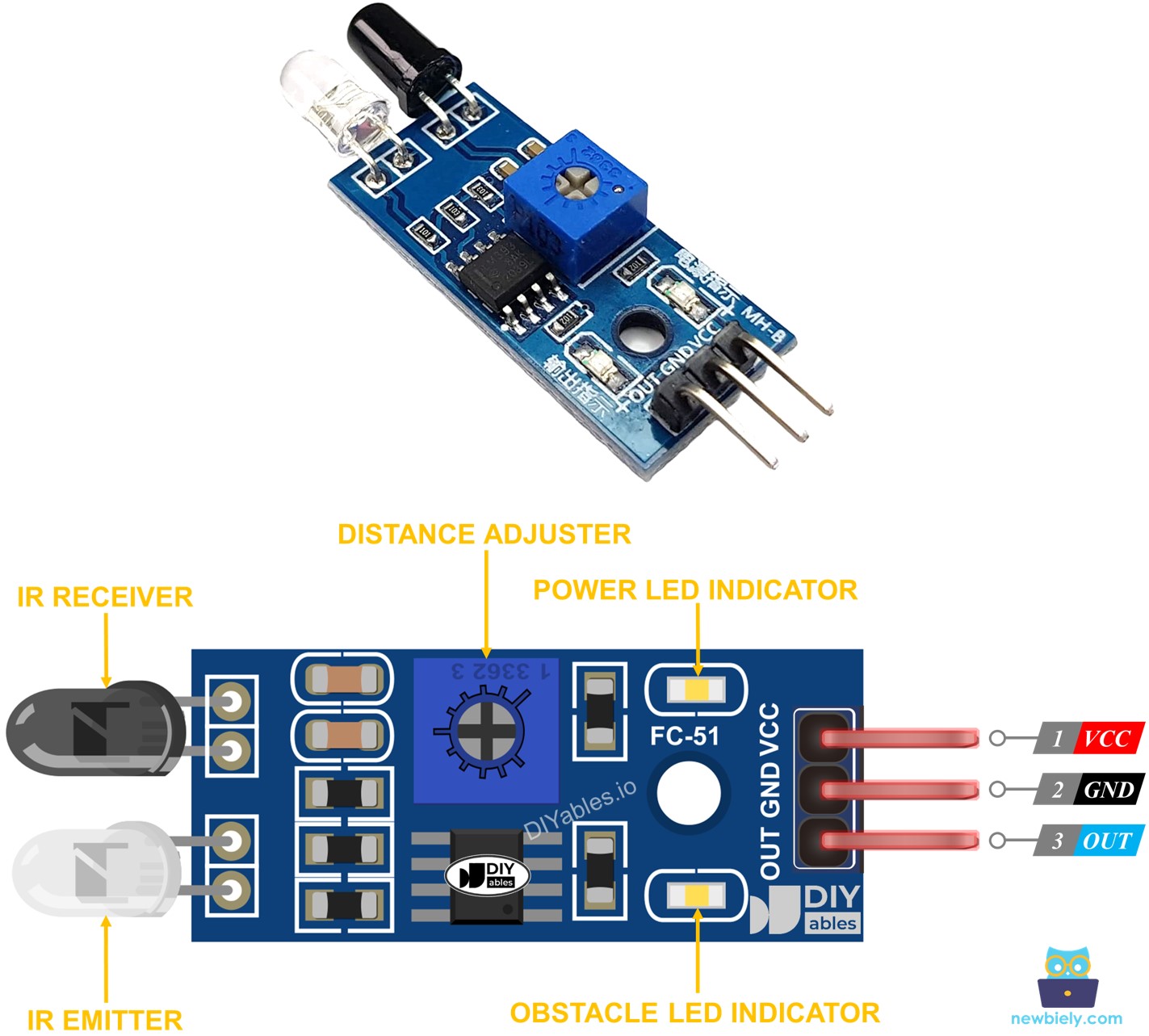
Pinout van de Infrarood Obstakel Vermijdingssensor
De IR obstakel vermijdingssensor heeft drie pinnen:
- GND pin: moet worden verbonden met GND (0V)
- VCC pin: moet worden verbonden met VCC (5V of 3.3V)
- OUT pin: is een uitgangspin, LOW wanneer er een obstakel aanwezig is, HIGH wanneer er geen obstakel is. Deze pin dient verbonden te worden met een input pin van de Raspberry Pi.
Hoe het werkt
De infrarood obstakelsensormodule bevat een ingebouwde IR zender en IR ontvanger. De IR zender zendt het IR-signaal uit. De IR ontvanger zoekt naar het teruggekaatste IR-signaal om te detecteren of er een object aanwezig is of niet. De OUT pin van de sensor geeft de aanwezigheid van een obstakel weer:
- Als er een obstakel voor de sensor is, wordt de OUT pin van de sensor LOW
- Als er geen obstakel voor de sensor is, wordt de OUT pin van de sensor HIGH
※ Notiz:
Tijdens het transport kan de sensor vervormd raken, wat storingen kan veroorzaken. Als de sensor niet correct werkt, stel dan de IR zender en ontvanger bij zodat ze parallel aan elkaar staan.
Bedradingsschema
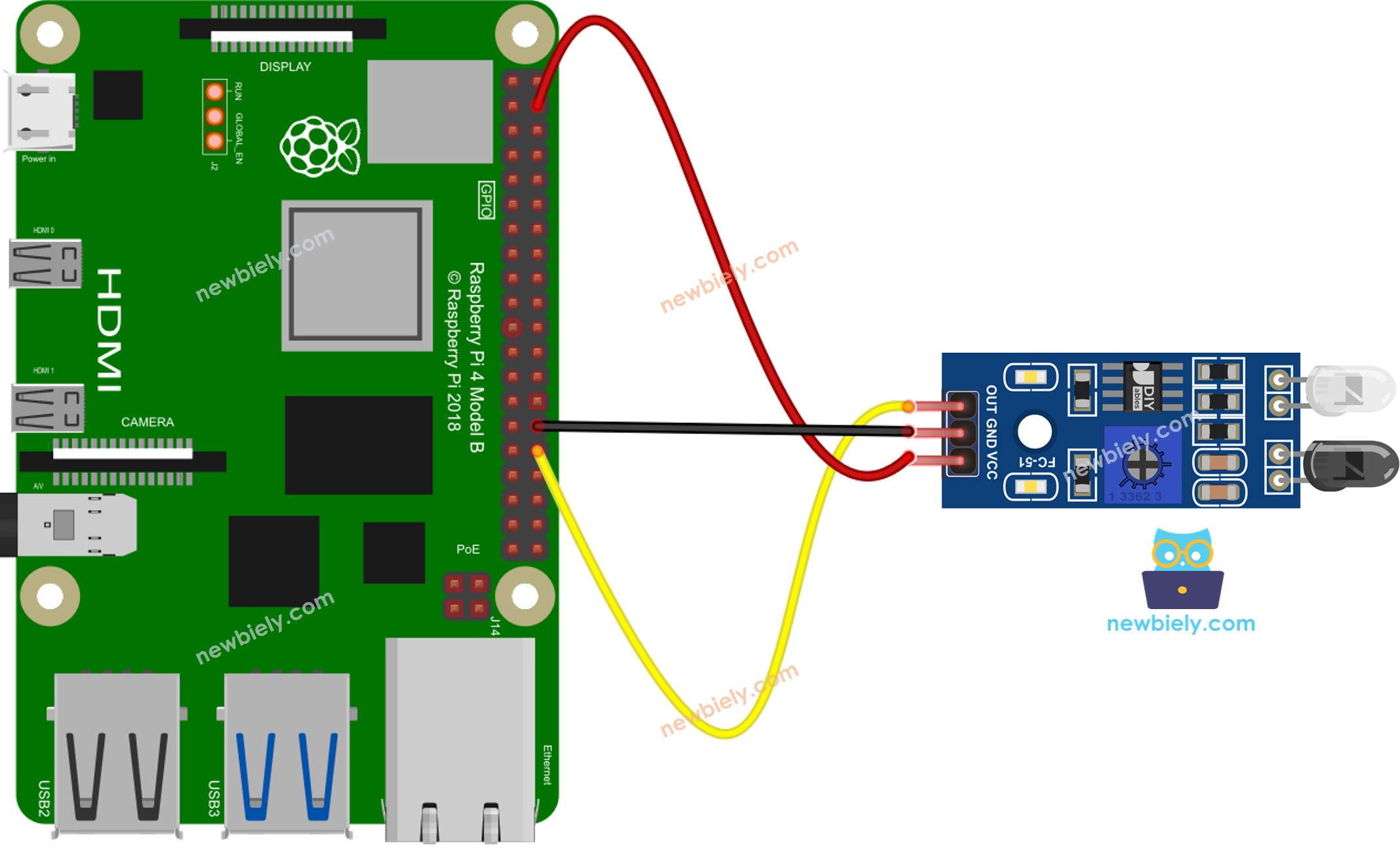
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Hoe te Programmeren voor IR Obstakel Vermijdingssensor
- Initialiseert de Raspberry Pi pin in digitale input-modus met de GPIO.setup() functie.
- Gebruik de GPIO.input() functie om de status van de Raspberry Pi pin uit te lezen.
Raspberry Pi Code
Er kunnen twee benaderingen worden gekozen bij het programmeren voor een obstakel vermijdingsapplicatie:
- Handelen op basis van of het obstakel aanwezig is of niet
- Handelen op basis van of het obstakel is gedetecteerd of verwijderd
Raspberry Pi code voor het controleren of het obstakel aanwezig is
Snelle stappen
- Zorg dat u Raspbian of een ander Raspberry Pi compatibel besturingssysteem geïnstalleerd hebt op uw Pi.
- Zorg dat uw Raspberry Pi verbonden is met hetzelfde lokale netwerk als uw pc.
- Zorg dat uw Raspberry Pi verbonden is met internet als u nog libraries moet installeren.
- Als dit de eerste keer is dat u een Raspberry Pi gebruikt, zie hoe u de Raspberry Pi instelt
- Verbind uw pc met de Raspberry Pi via SSH met de ingebouwde SSH client op Linux en macOS of met PuTTY op Windows. Zie hoe u uw pc met Raspberry Pi verbindt via SSH.
- Zorg dat de RPi.GPIO bibliotheek geïnstalleerd is. Zo niet, installeer deze dan met het volgende commando:
- Maak een Python script aan met de naam obstacle_sensor.py en voeg de volgende code toe:
- Sla het bestand op en voer het Python script uit door het volgende commando in de terminal te typen:
- Plaats gedurende enige tijd een obstakel voor de sensor en haal het dan weer weg.
- Controleer de uitvoer in de Terminal.
Het script draait oneindig in een lus door tot u in de terminal Ctrl + C indrukt.
Raspberry Pi code voor het detecteren van obstakels
Snelle stappen
- Maak een Python script aan met de naam obstacle_sensor_events.py en voeg de volgende code toe:
- Sla het bestand op en voer het Python script uit door het volgende commando in de terminal te typen:
- Plaats een obstakel voor de sensor en haal het daarna weer weg.
- Bekijk de resultaten in de Terminal.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.