Raspberry Pi - Servo Motor
Deze tutorial legt uit hoe u een Raspberry Pi kunt gebruiken om een servo motor aan te sturen. In detail leert u:
- Hoe u een servo motor aansluit op een Raspberry Pi
- Hoe u een programma schrijft voor Raspberry Pi om een servo motor te laten draaien
- Hoe u de snelheid van een servo motor controleert met Raspberry Pi
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over de Servo Motor
Een servo motor is een component die zijn as kan draaien binnen een vooraf bepaalde bewegingshoek, meestal tussen 0 en 180 graden. Het wordt vaak gebruikt om de hoekpositie van een object nauwkeurig te regelen.
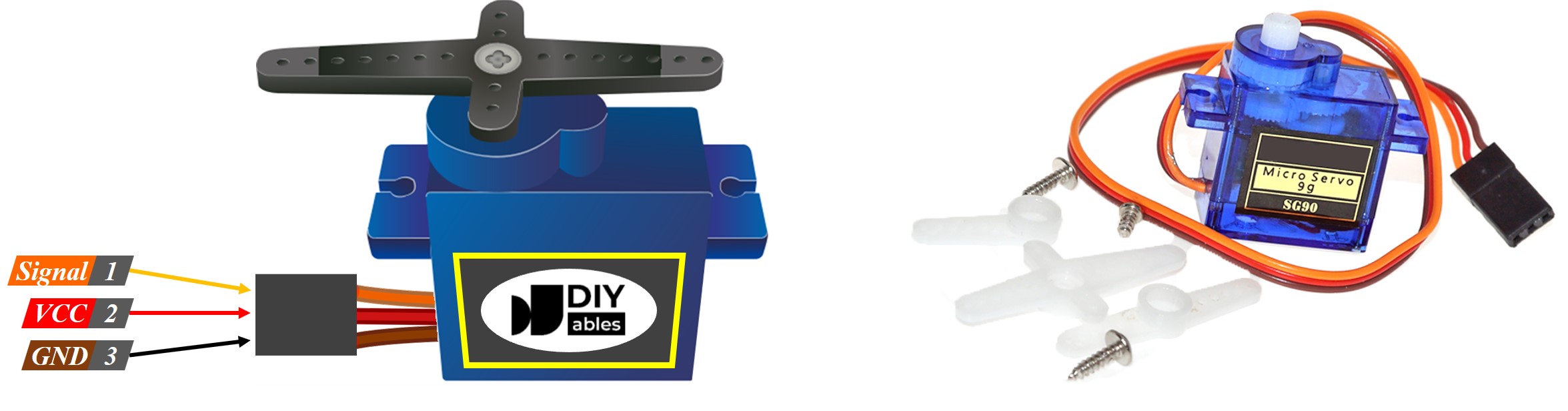
De Servo Motor Pinout
De servo motor heeft drie pinnen:
- VCC pin (meestal rood) die verbonden moet worden met VCC (5V)
- GND pin (typisch zwart of bruin) die verbonden moet worden met GND (0V)
- Signaalpin (normaal geel of oranje) die het PWM-controlesignaal ontvangt van een Raspberry Pi pin.
Raspberry Pi - Servo Motor
Sommige pinnen op de Raspberry Pi kunnen geprogrammeerd worden om een PWM-signaal (Pulse Width Modulation) te genereren. We kunnen een servo motor aansturen door zijn signaalpin te verbinden met een van deze Raspberry Pi-pinnen en deze te programmeren om PWM-signalen te produceren.
Dankzij de Raspberry Pi Servo library is het aansturen van een servo motor eenvoudig. We hoeven niet te begrijpen hoe de servo motor precies werkt of hoe het PWM-signaal wordt gegenereerd. Alles wat we moeten leren is hoe we de library kunnen gebruiken.
Bedradingsschema
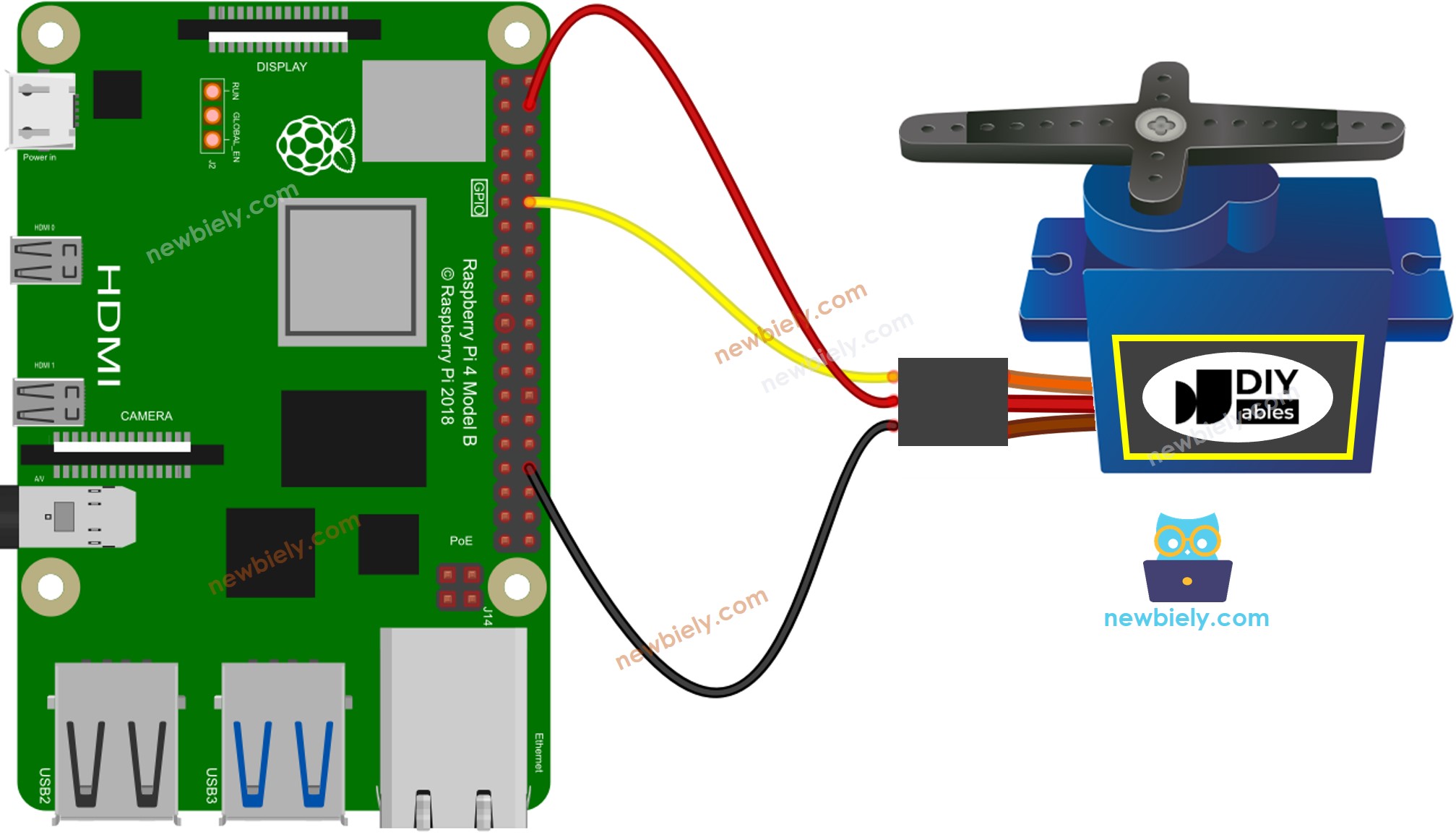
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Voor het eenvoudig houden van de dingen wordt het bovenstaande bedrading schema gebruikt voor testen en leren, en is geschikt voor een servo motor met een laag koppel. Wij raden sterk aan een externe voeding te gebruiken voor de servo motor. Het onderstaande bedrading schema laat zien hoe u de servo motor aansluit op een externe voeding.
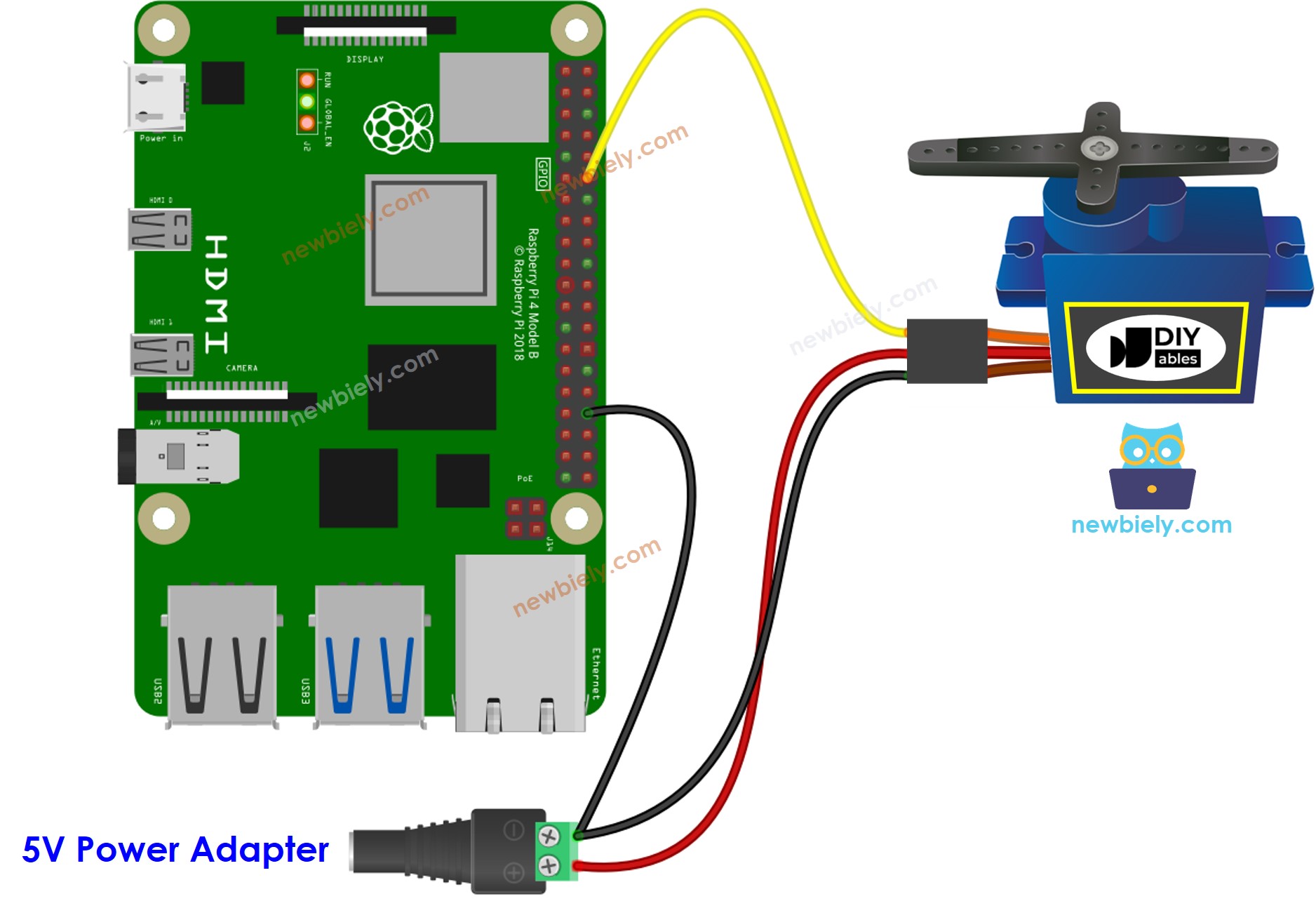
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Raspberry Pi Code
Snelle Stappen
- Zorg dat u Raspbian of een ander Raspberry Pi compatibel besturingssysteem geïnstalleerd hebt op uw Raspberry Pi.
- Zorg dat uw Raspberry Pi verbonden is met hetzelfde lokale netwerk als uw pc.
- Zorg dat uw Raspberry Pi verbinding heeft met het internet indien u bibliotheken moet installeren.
- Als dit de eerste keer is dat u Raspberry Pi gebruikt, bekijk dan hoe u de Raspberry Pi instelt.
- Verbind uw pc met de Raspberry Pi via SSH met behulp van de ingebouwde SSH-client op Linux en macOS of PuTTY op Windows. Zie hoe u uw pc verbindt met Raspberry Pi via SSH.
- Zorg dat u de RPi.GPIO bibliotheek geïnstalleerd hebt. Zo niet, installeer deze met het volgende commando:
- Maak een Python-scriptbestand aan met de naam servo_motor.py en voeg de volgende code toe:
- Sla het bestand op en voer het Python-script uit door het volgende commando in de terminal te typen:
Het script draait in een oneindige lus totdat u Ctrl + C in de terminal indrukt.
- Bekijk het resultaat: De servo motor draait langzaam zowel met de klok mee als tegen de klok in, tot 180°.
Code Uitleg
Bekijk de regel-voor-regel uitleg in de commentaren van de broncode!
Hoe de Snelheid van de Servo Motor te Controleren
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten en helpt het proces gemakkelijker te maken.