Raspberry Pi - Stappenmotor en Limietschakelaar
Deze handleiding legt uit hoe u een Raspberry Pi kunt gebruiken om een stappenmotor aan te sturen via een limietschakelaar en een L298N driver. Specifiek behandelen we:
- Hoe u de Raspberry Pi programmeert om de stappenmotor te stoppen zodra een limietschakelaar wordt aangeraakt.
- Hoe u de Raspberry Pi programmeert om de draairichting van de stappenmotor te veranderen wanneer een limietschakelaar wordt aangeraakt.
- Hoe u de Raspberry Pi programmeert om de draairichting van de stappenmotor te wijzigen met twee limietschakelaars die tegenover elkaar geplaatst zijn.
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over Stappenmotor en Limietschakelaar
Als u niet vertrouwd bent met de stappenmotor en limietschakelaar (inclusief pinout, functionaliteit, programmering, enz.), kunnen de volgende tutorials u helpen:
- Raspberry Pi - Limietschakelaar tutorial
- Raspberry Pi - Stappenmotor tutorial
Bekabelingsschema
Deze handleiding bevat het bekabelingsschema voor twee gevallen: één stappenmotor + één limietschakelaar, één stappenmotor + twee limietschakelaars.
- Bekabelingsschema tussen Raspberry Pi, stappenmotor en één limietschakelaar
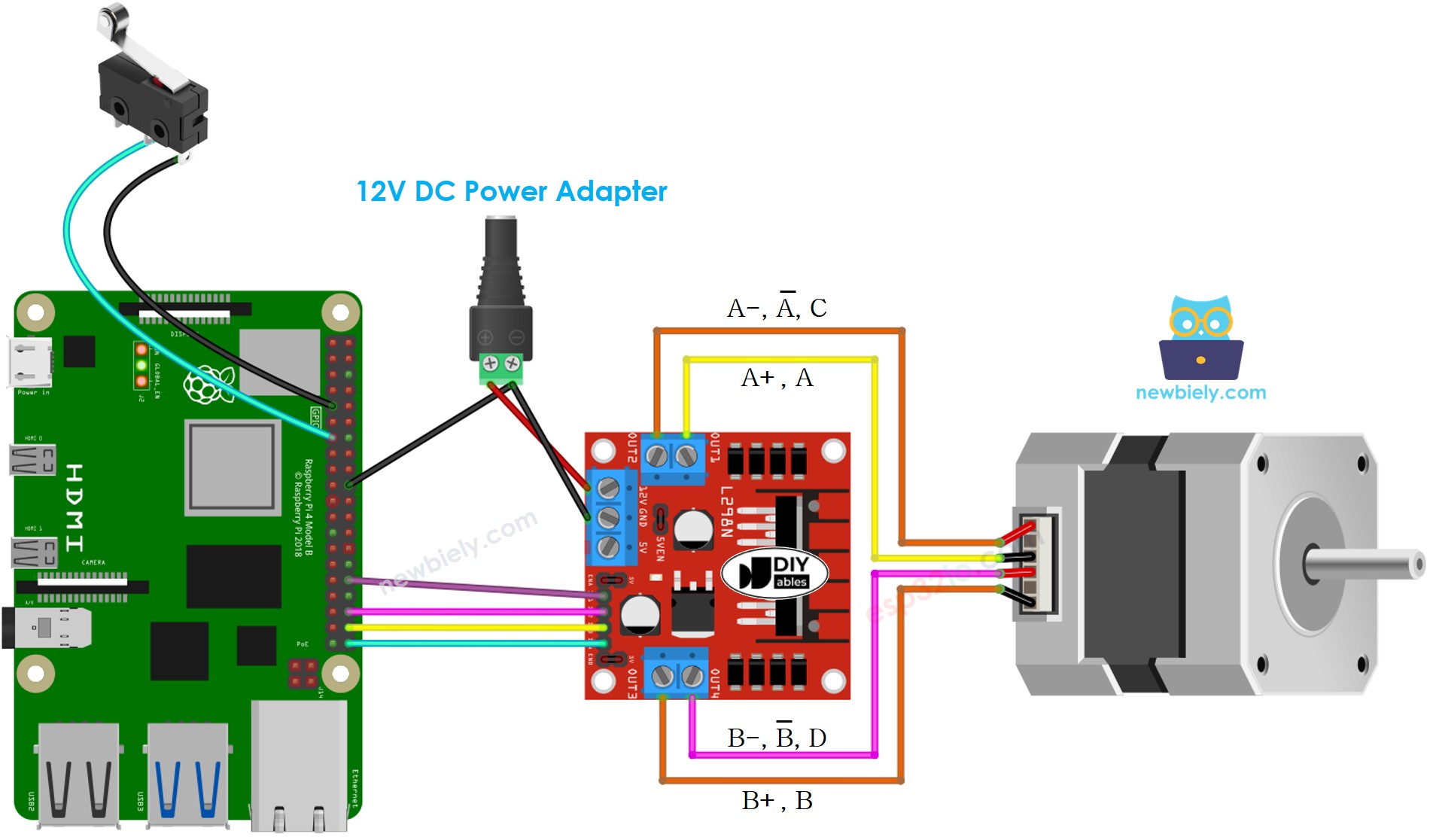
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
- Bekabelingsschema tussen Raspberry Pi, stappenmotor en twee limietschakelaars
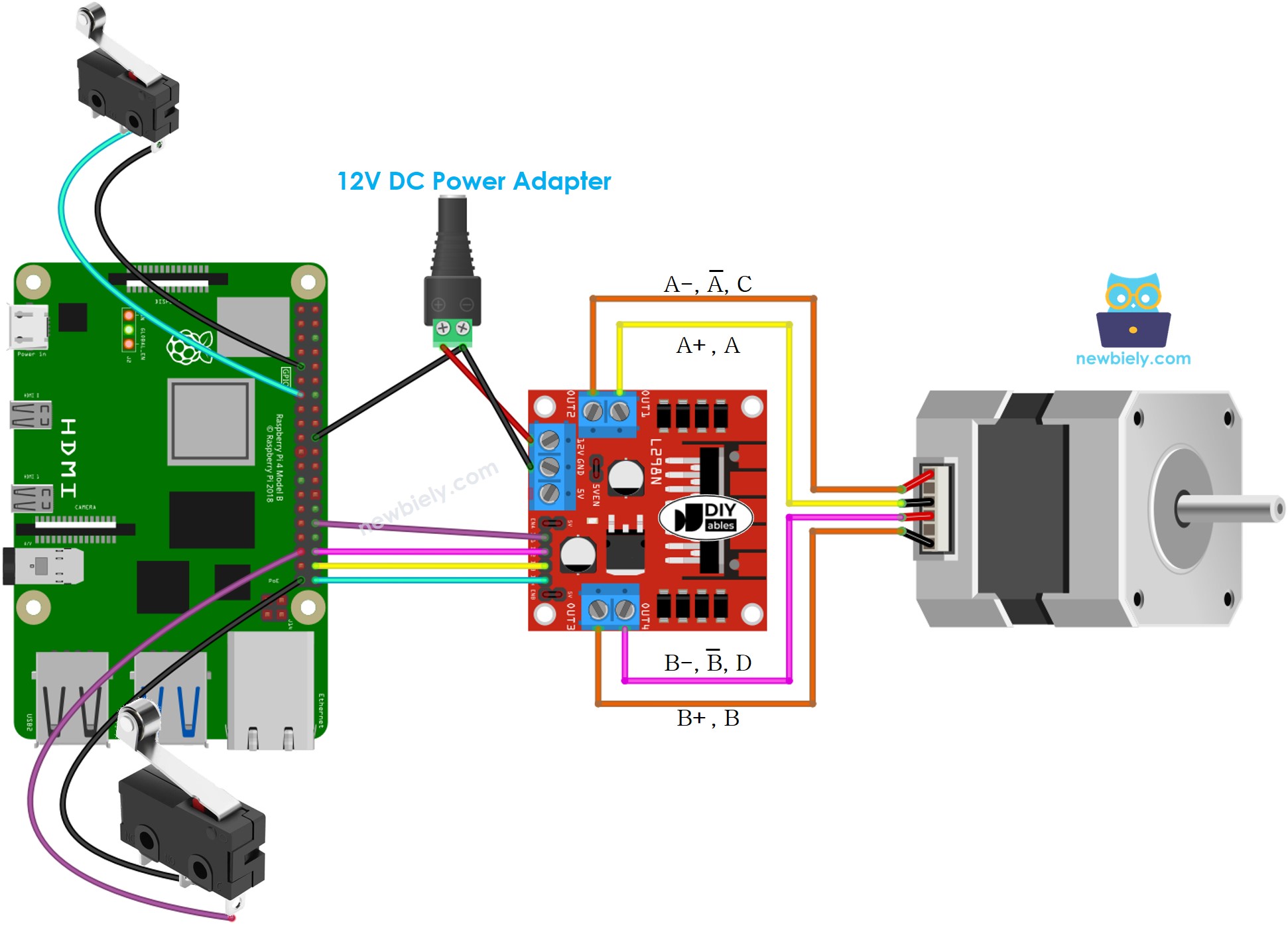
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
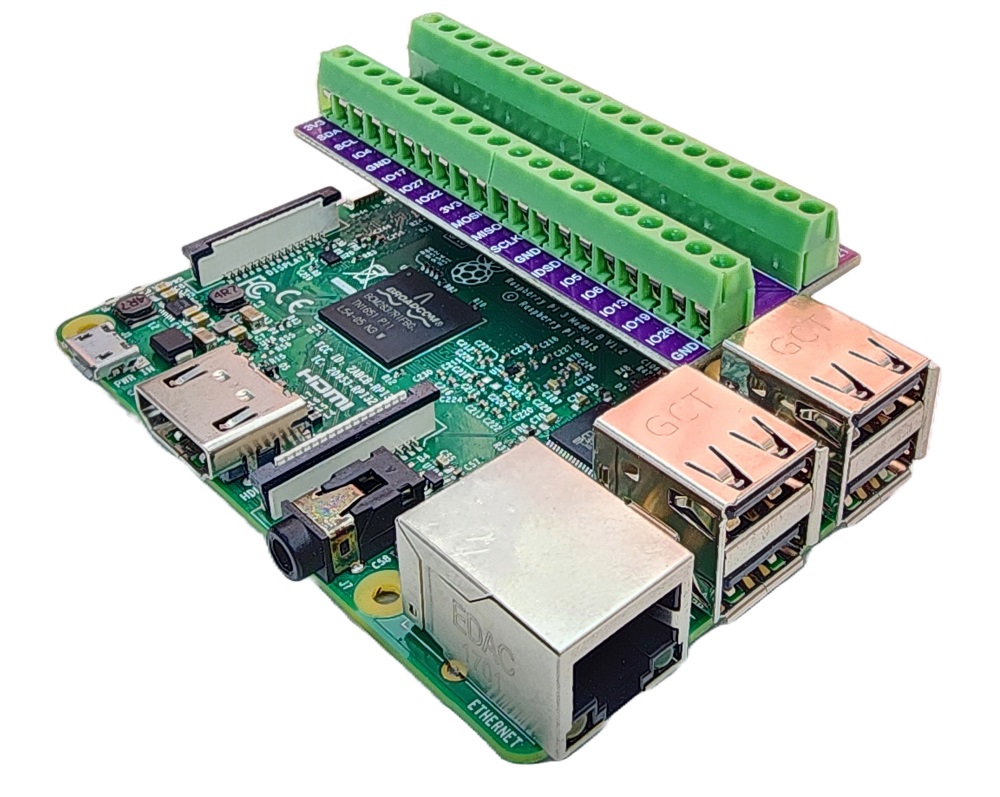
Om uw bekabelingsopstelling te vereenvoudigen en te organiseren, raden we het gebruik van een Schroevenklemaansluiting-shield voor Raspberry Pi aan. Deze shield zorgt voor veiligere en beter beheerbare verbindingen, zoals hieronder weergegeven:
※ Notiz:
De bekabeling tussen de stappenmotor en de L298N kan verschillen afhankelijk van het type stappenmotor. Bestudeer zorgvuldig de Raspberry Pi - Stappenmotor tutorial om te leren hoe u de stappenmotor correct aansluit op de L298N motor driver.
Raspberry Pi Code - Stappenmotor Stoppen met een Limietschakelaar
Een stappenmotor wordt met de volgende code geprogrammeerd om continu te draaien, en zal onmiddellijk stoppen wanneer een limietschakelaar wordt aangeraakt. De motor hervat de beweging zodra de limietschakelaar wordt losgelaten.
Snel Starten
- Zorg dat u Raspbian of een ander Raspberry Pi compatibel besturingssysteem op uw Pi geïnstalleerd heeft.
- Zorg dat uw Raspberry Pi verbonden is met hetzelfde lokale netwerk als uw pc.
- Zorg dat uw Raspberry Pi toegang tot internet heeft indien u bibliotheken moet installeren.
- Als dit de eerste keer is dat u een Raspberry Pi gebruikt, zie hoe u de Raspberry Pi installeert
- Verbind uw pc met de Raspberry Pi via SSH met behulp van de ingebouwde SSH-client op Linux en macOS of PuTTY op Windows. Zie hoe u uw pc via SSH verbindt met Raspberry Pi.
- Zorg dat de RPi.GPIO bibliotheek geïnstalleerd is. Zo niet, installeer die met het volgende commando:
- Maak een Python-scriptbestand stepper_limit_switch.py aan en voeg de volgende code toe:
- Sla het bestand op en start het Python-script door het volgende commando in de terminal uit te voeren:
- Als de bekabeling correct is, zal de motor klokwijs draaien.
- Zodra de limietschakelaar wordt aangeraakt, stopt de motor direct.
- Laat u de limietschakelaar los, dan draait de motor weer verder.
Het script loopt in een oneindige lus totdat u in de terminal Ctrl + C indrukt.
Door de waarde van de variabele delay in de code te veranderen kunt u de snelheid van de stappenmotor aanpassen.
Code Uitleg
Bekijk de stapsgewijze uitleg in de commentaren van de broncode!
Raspberry Pi Code - Draairichting Stappenmotor Wijzigen met een Limietschakelaar
Een stappenmotor wordt continu in beweging gezet en de draairichting verandert zodra een limietschakelaar wordt aangeraakt.
Snel Starten
- Maak een Python-scriptbestand stepper_direction.py aan en voeg de volgende code toe:
- Sla het bestand op en start het Python-script door het volgende commando in de terminal uit te voeren:
- Als de bekabeling correct is, draait de motor met de klok mee.
- Wanneer u de limietschakelaar indrukt, verandert de draairichting van de stappenmotor naar tegen de klok in.
- Druk nogmaals op de limietschakelaar en de stappenmotor draait weer met de klok mee.
Raspberry Pi Code - Draairichting Stappenmotor Wijzigen met twee Limietschakelaars
Hier volgt code die een stappenmotor continu laat draaien, en bij aanraking van één van de twee limietschakelaars de draairichting van de motor wijzigt.
Snel Starten
- Maak een Python-scriptbestand stepper_two_limit_switches.py aan en voeg de volgende code toe:
- Sla het bestand op en start het Python-script door het volgende commando in de terminal uit te voeren:
Het script blijft continu draaien totdat u in de terminal Ctrl + C indrukt.
- Als de bekabeling correct is, draait de motor met de klok mee.
- Wanneer u limietschakelaar 1 indrukt, verandert de draairichting van de stappenmotor naar tegen de klok in.
- Het indrukken van limietschakelaar 2 zorgt ervoor dat de stappenmotor weer met de klok mee draait.