Raspberry Pi - Ultrasone Sensor - Servo Motor
Deze handleiding legt uit hoe u een Raspberry Pi en een ultrasone sensor gebruikt om een servo motor aan te sturen. In detail:
- Als een object dichtbij de ultrasone sensor is, draait de Raspberry Pi de servo motor naar 90 graden.
- Als een object ver weg is van de ultrasone sensor, draait de Raspberry Pi de servo motor terug naar 0 graden.
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Ultrasone Sensor
Als u nog niet bekend bent met de servo motor en ultrasone sensor (pinout, werking, programmeren ...), kunnen de volgende tutorials u helpen:
Bedradingsschema
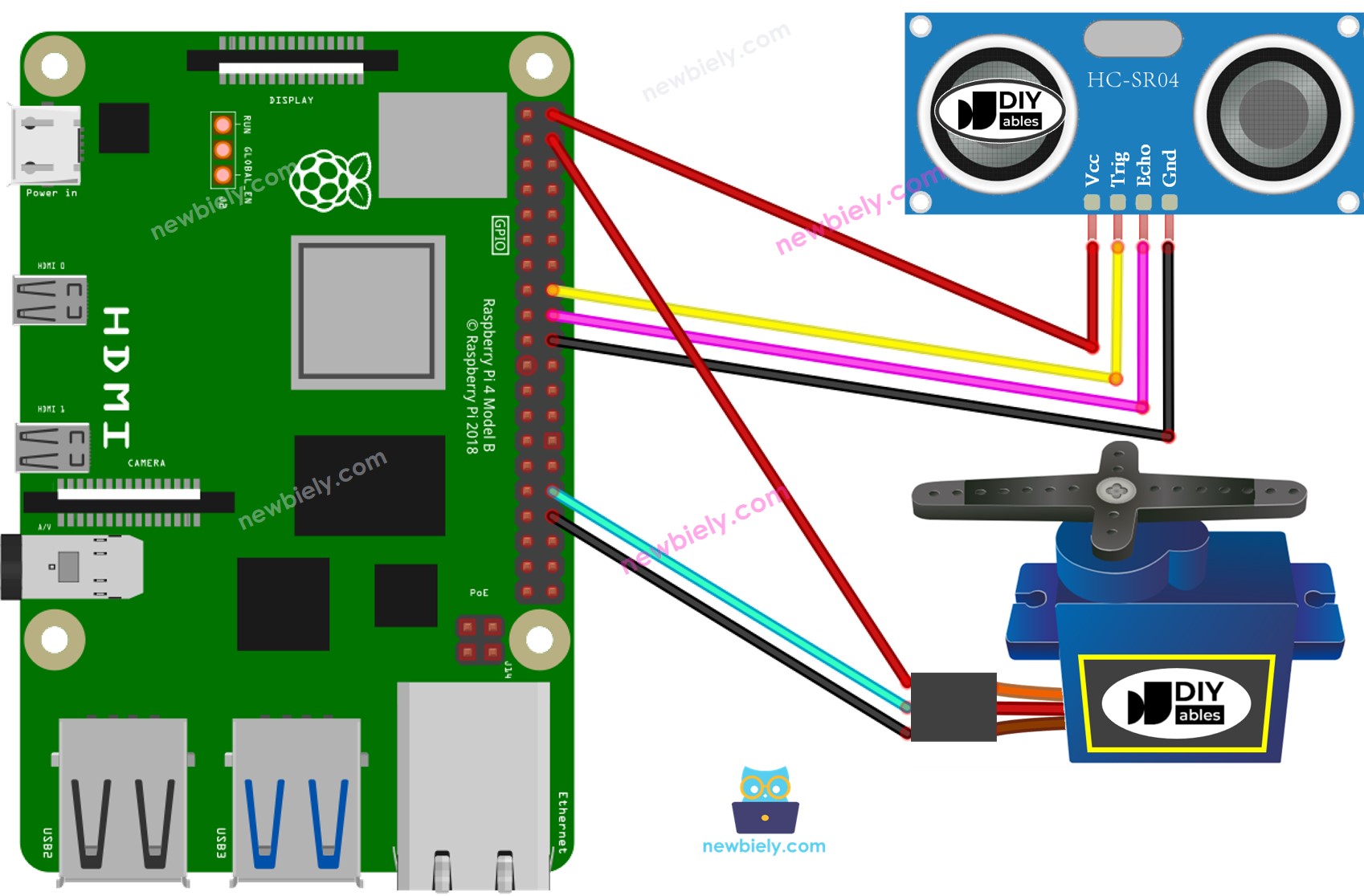
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Let op dat het bovenstaande bedrading schema alleen geschikt is voor een servo motor met laag koppel. Als de motor trilt in plaats van draait, moet u een externe voedingsbron gebruiken om meer stroom te leveren aan de servo motor. Hieronder wordt het bedrading schema met een externe voedingsbron voor de servo motor weergegeven.
TOE TE VOEGEN AFBEELDING
Vergeet niet om de GND van de externe voeding te verbinden met de GND van de Raspberry Pi.
Raspberry Pi Code - Ultrasone Sensor Stuurt Servo Motor aan
Snel Starten
- Zorg ervoor dat u Raspbian of een ander compatibel besturingssysteem voor Raspberry Pi op uw Pi heeft geïnstalleerd.
- Zorg ervoor dat uw Raspberry Pi verbonden is met hetzelfde lokale netwerk als uw pc.
- Zorg ervoor dat uw Raspberry Pi verbonden is met internet indien u bibliotheken moet installeren.
- Als dit de eerste keer is dat u een Raspberry Pi gebruikt, zie hoe u de Raspberry Pi instelt
- Verbind uw pc met de Raspberry Pi via SSH met de ingebouwde SSH-client op Linux en macOS, of met PuTTY op Windows. Zie hoe uw pc met Raspberry Pi te verbinden via SSH.
- Controleer of u de RPi.GPIO-bibliotheek geïnstalleerd heeft. Zo niet, installeer deze dan met het volgende commando:
- Maak een Python-scriptbestand aan met de naam ultrasonic_servo.py en voeg de volgende code toe:
- Sla het bestand op en voer het Python-script uit door het volgende commando in de terminal te typen:
Het script draait oneindig door totdat u Ctrl + C indrukt in de terminal.
- Maak een bewegende hand voor de sensor.
- Bekijk de beweging van de servo motor.
※ Notiz:
De code hierboven is bedoeld voor educatieve doeleinden. De ultrasone sensor is zeer gevoelig voor storingen (ruis). Als u de ultrasone sensor in een praktische toepassing wilt gebruiken, moet u ruisfiltering toepassen. Voor meer informatie over het filteren van ruis uit afstandsmetingen van een ultrasone sensor verwijzen we u naar deze tutorial.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze videotutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten en helpt u stap voor stap met de implementatie.