Raspberry Pi - Potentiometer Servo Motor
Deze tutorial leert u hoe u een Raspberry Pi gebruikt om de hoek van een servo motor te regelen op basis van de invoerwaarde van een potentiometer. In detail leert u:
- Hoe u de potentiometer en servo motor aansluit op de Raspberry Pi
- Hoe u de Raspberry Pi programmeert om de waarde van een potentiometer uit te lezen en de servo motor dienovereenkomstig te besturen
Hardware Benodigdheden
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Potentiometer
Bent u nog niet bekend met servo motoren en potentiometers (pinouts, hoe ze werken, hoe u ze programmeert, enzovoorts), dan kunnen de volgende tutorials u helpen:
Bedradingsschema
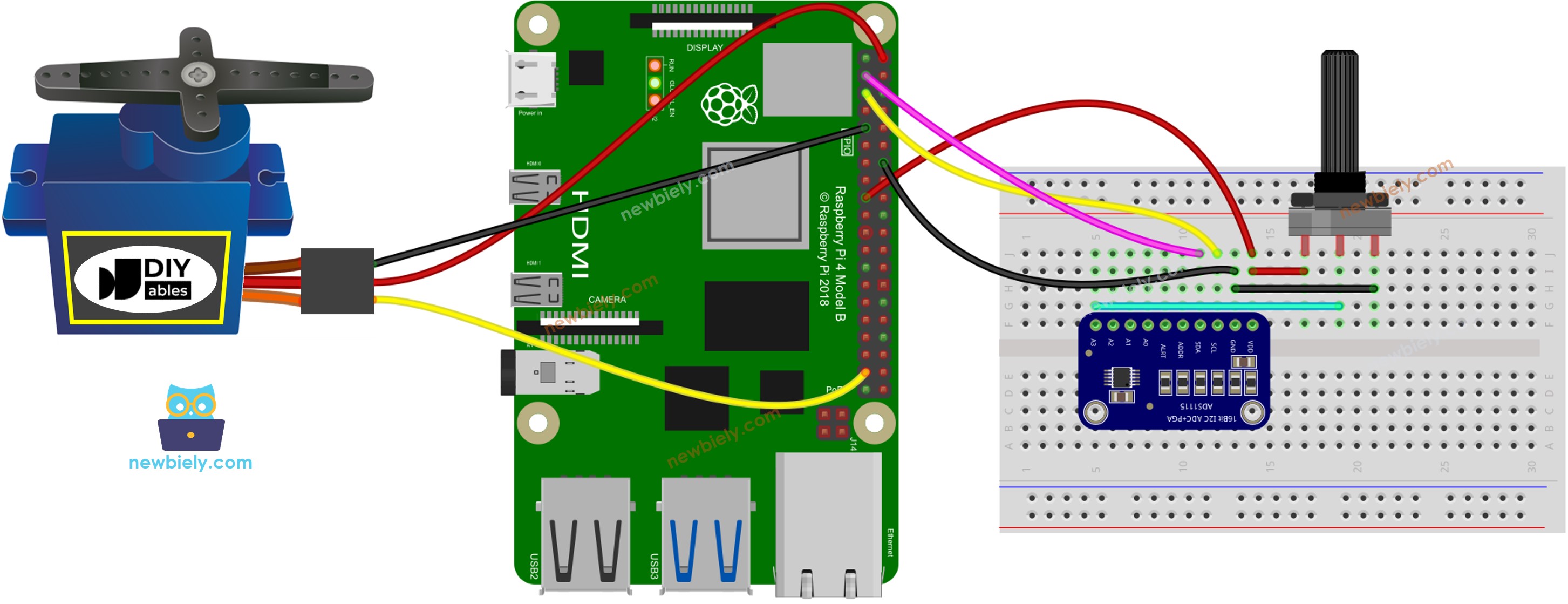
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
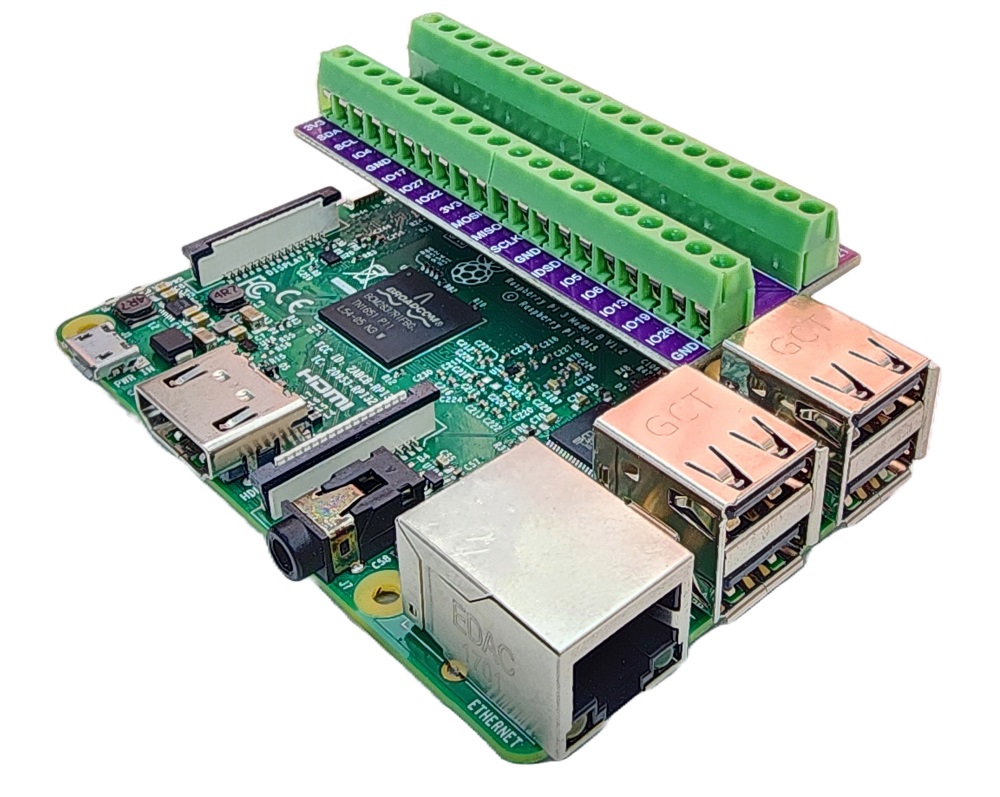
Om uw bekabelingsopstelling te vereenvoudigen en te organiseren, raden we het gebruik van een Schroevenklemaansluiting-shield voor Raspberry Pi aan. Deze shield zorgt voor veiligere en beter beheerbare verbindingen, zoals hieronder weergegeven:
Raspberry Pi Code
Snel aan de slag
- Zorg dat u Raspbian of een ander Raspberry Pi-compatibel besturingssysteem op uw Pi hebt geïnstalleerd.
- Zorg dat uw Raspberry Pi verbonden is met hetzelfde lokale netwerk als uw pc.
- Zorg dat uw Raspberry Pi verbonden is met internet als u bepaalde libraries moet installeren.
- Gebruikt u voor het eerst een Raspberry Pi? Zie hoe Raspberry Pi in te stellen
- Verbind uw pc met de Raspberry Pi via SSH met de ingebouwde SSH-client op Linux en macOS of met PuTTY op Windows. Zie hoe uw pc met Raspberry Pi via SSH te verbinden.
- Zorg dat u de RPi.GPIO library geïnstalleerd hebt. Zo niet, installeer die met het volgende commando:
- Installeer de Adafruit_ADS1x15 library door het volgende commando op uw Raspberry Pi terminal uit te voeren:
- Maak een Python scriptbestand aan met de naam potentiometer_servo.py en voeg de volgende code toe:
- Bewaar het bestand en start het Python script door het volgende commando in de terminal uit te voeren:
Het script draait in een oneindige lus totdat u Ctrl + C indrukt in de terminal.
- Draai aan de potentiometer
- Bekijk de rotatie van de servo motor
- Volg de resultaten in de Seriële Monitor
Code-uitleg
Bekijk de regel-voor-regel uitleg die te vinden is in de commentaren van de broncode!
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.