Raspberry Pi - Touch Sensor - Servo Motor
Deze tutorial legt uit hoe u de Raspberry Pi en een touch sensor gebruikt om een servo motor aan te sturen. In detail:
- Hoe u met de Raspberry Pi de servo motor 90 graden laat draaien wanneer de touch sensor wordt aangeraakt
- Hoe u met de Raspberry Pi de servo motor terug naar 0 graden laat draaien wanneer de touch sensor opnieuw wordt aangeraakt.
Dezelfde stappen worden herhaald.
Hardware benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Touch Sensor
Als u niet bekend bent met servo motoren en touch sensoren (inclusief pinouts, functionaliteit en programmering), kunnen de volgende tutorials u helpen:
Bedradingsschema
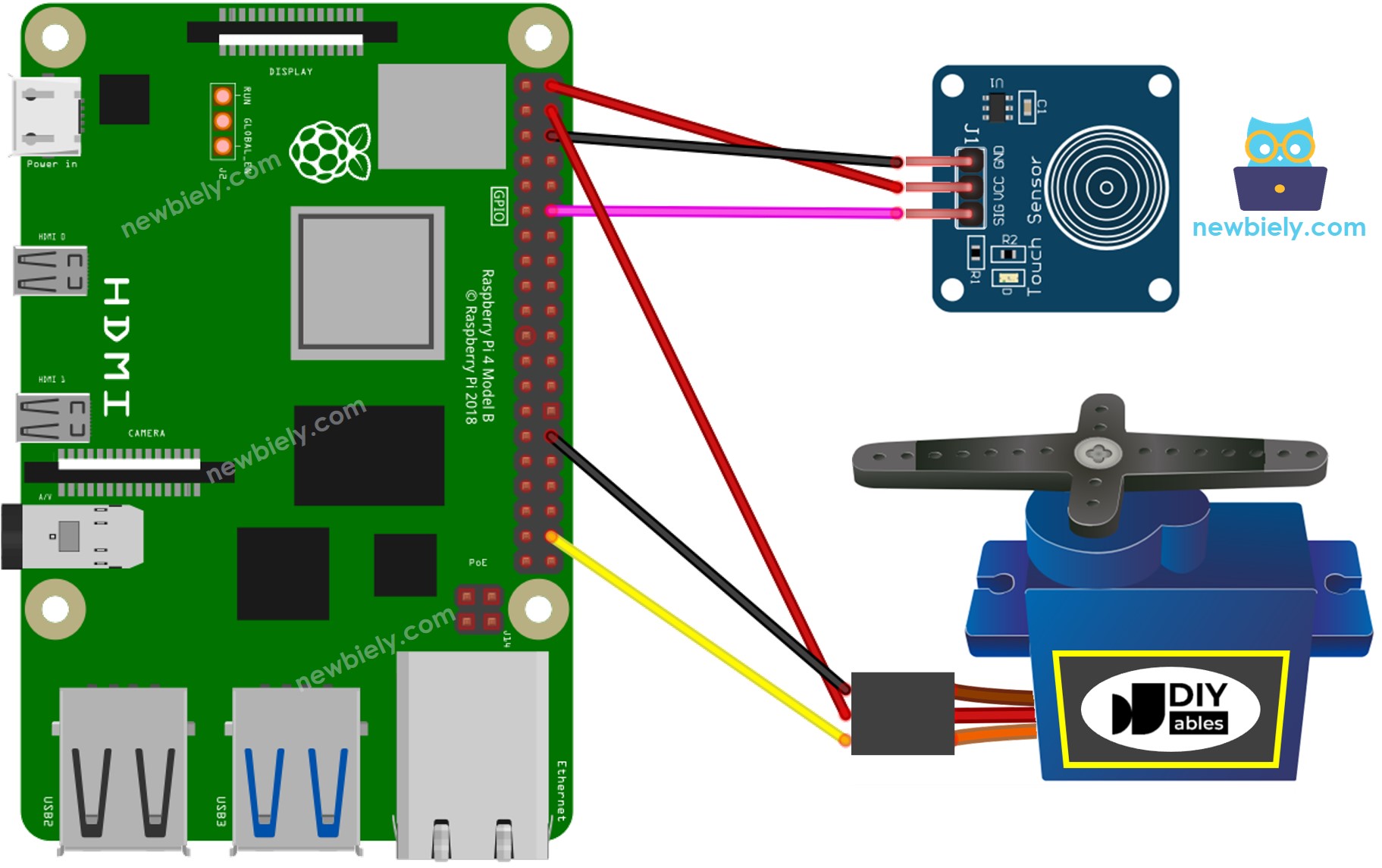
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
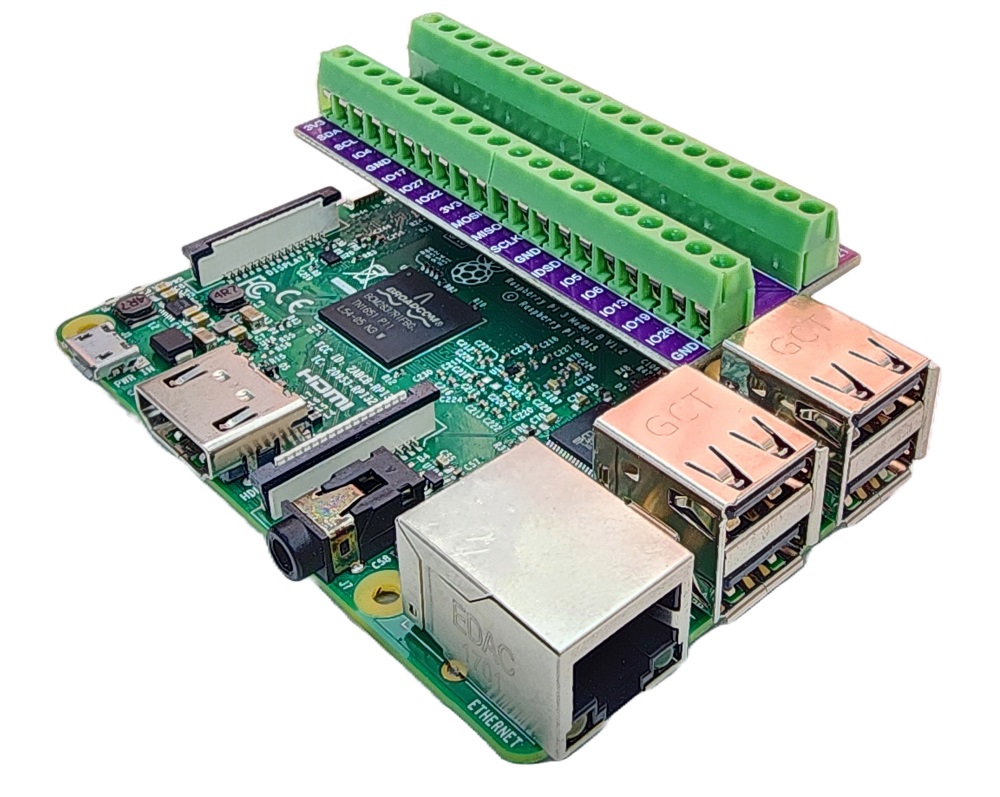
Om uw bekabelingsopstelling te vereenvoudigen en te organiseren, raden we het gebruik van een Schroevenklemaansluiting-shield voor Raspberry Pi aan. Deze shield zorgt voor veiligere en beter beheerbare verbindingen, zoals hieronder weergegeven:
Houd er rekening mee dat het hierboven getoonde bedrading schema alleen geschikt is voor een servo motor met een laag koppel (low torque). Als de motor trilt in plaats van draait, moet er een externe voeding worden gebruikt om meer vermogen aan de servo motor te leveren. Hieronder wordt het bedrading schema met een externe voeding voor de servo motor getoond.
TO BE ADD IMAGE
Vergeet niet om de GND van de externe voeding te verbinden met de GND van de Raspberry Pi.
Raspberry Pi Code - Touch Sensor bestuurt Servo Motor
Snelle Stappen
- Zorg ervoor dat u Raspbian of een ander Raspberry Pi compatibel besturingssysteem op uw Pi hebt geïnstalleerd.
- Zorg ervoor dat uw Raspberry Pi is verbonden met hetzelfde lokale netwerk als uw pc.
- Zorg ervoor dat uw Raspberry Pi verbonden is met internet als u sommige libraries moet installeren.
- Als dit de eerste keer is dat u de Raspberry Pi gebruikt, bekijk dan hoe u de Raspberry Pi instelt
- Verbind uw pc met de Raspberry Pi via SSH met de ingebouwde SSH-client op Linux en macOS of PuTTY op Windows. Zie hoe u uw pc verbindt met Raspberry Pi via SSH.
- Zorg ervoor dat u de RPi.GPIO library geïnstalleerd hebt. Zo niet, installeer deze dan met het volgende commando:
- Maak een Python scriptbestand touch_sensor_servo.py aan en voeg de volgende code toe:
- Sla het bestand op en voer het Python script uit door het volgende commando in de terminal te typen:
- Tik meerdere keren op de touch sensor.
- Bekijk hoe de hoek van de servo motor verandert.
Het script draait in een oneindige lus totdat u Ctrl + C indrukt in de terminal.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.