Raspberry Pi - TCS3200D/TCS230 Kleursensor
Deze uitgebreide handleiding laat u zien hoe u de TCS3200D/TCS230 kleursensor aansluit op de Raspberry Pi voor nauwkeurige kleurmeting en het uitlezen van RGB-waarden. Beheers de kalibratieprocedures en ontwikkel kleurherkenningsfuncties voor uw projecten.
Leerdoelen:
- Verbindingen tot stand brengen tussen de TCS3200D/TCS230 en Raspberry Pi
- Sensor kalibreren om omgevingsruis te elimineren
- Raspberry Pi programma’s ontwikkelen voor RGB-kleurmeting
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over de TCS3200D/TCS230 Kleursensor
De TCS3200D/TCS230 sensor maakt gebruik van een fotodiode-matrix die is georganiseerd in een 8×8 raster voor kleurdetectie door middel van optische filtering. Binnen deze array met 64 elementen bevatten 16 fotodiodes rode spectrale filters, nog eens 16 gebruiken groene filters, 16 hebben blauwe filters en de resterende 16 werken zonder filter (heldere respons). Kleurmeting vindt plaats door specifieke filtersets te activeren en de resulterende frequentie-gemoduleerde vierkante golf uitgang te analyseren.
Typische modules zijn uitgerust met ingebouwde witte LED-arrays die zorgen voor constante verlichting van het meetobject, wat de stabiliteit van metingen garandeert ongeacht variaties in externe lichtbronnen en de prestaties verbetert in omgevingen met weinig licht.
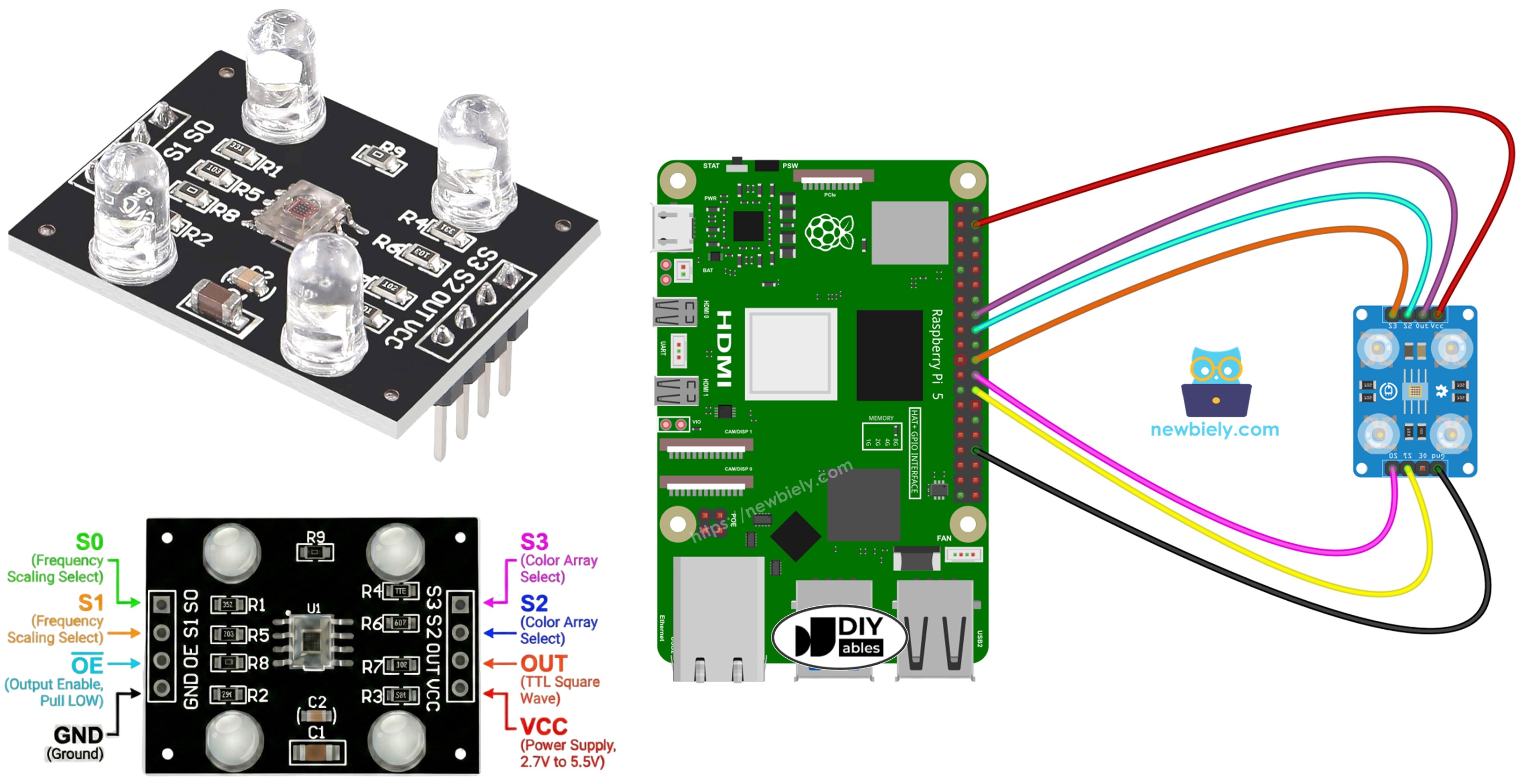
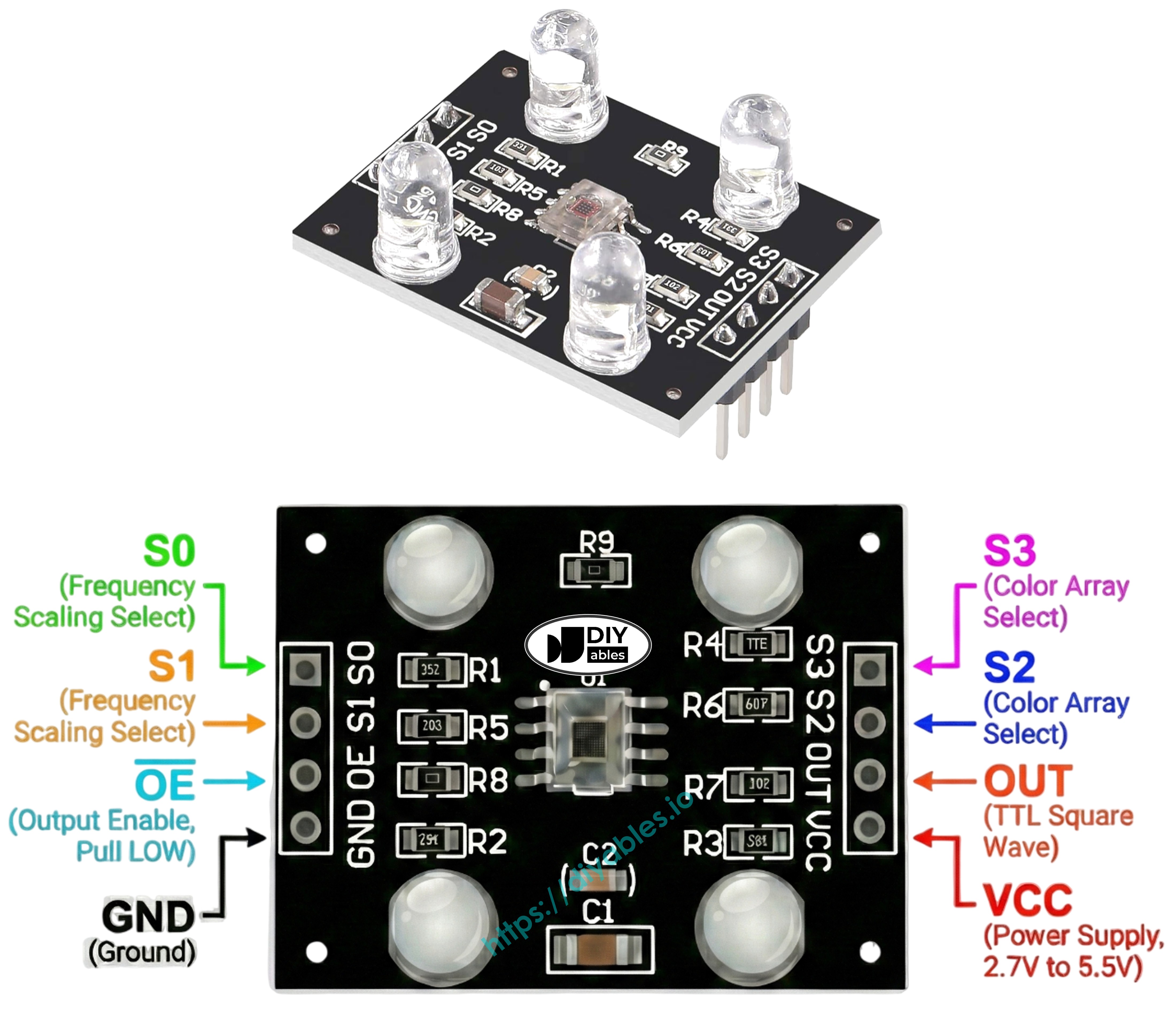
Pin-out
Beschikbare aansluitingen op het TCS3200D/TCS230 sensorbord:
- VCC pin: Voedingsspanning invoer (+5V)
- GND pin: Massa (0V)
- S0, S1 pins: Selectoren voor de schaal van de frequentie-uitgang
- S2, S3 pins: Selectoren voor het kleurkanaal/filter
- OUT pin: Frequentie-gemoduleerde vierkante golf uitgang
- OE pin: Ingang om uitgang te activeren (actief bij LOW). Standaardmodules hebben deze pin intern doorverbonden met GND. Als dit niet het geval is, sluit deze dan handmatig aan op GND.
Hoe Werkt Het
Twee belangrijke instellingen bepalen het gedrag van de sensor: welk kleurkanaal wordt geactiveerd en welke uitgangssignaalsterkte wordt gegenereerd. Twee paar controlinputs regelen deze functies:
Frequentieschaalbesturing (S0 en S1 pins):
- S0=LOW, S1=LOW: Uitschakeling (power down)
- S0=LOW, S1=HIGH: 2% schaalfactor
- S0=HIGH, S1=LOW: 20% schaalfactor
- S0=HIGH, S1=HIGH: 100% schaalfactor (volledige snelheid)
Kleurkanaalselectie (S2 en S3 pins):
- S2=LOW, S3=LOW: Rode fotodiodes actief
- S2=LOW, S3=HIGH: Blauwe fotodiodes actief
- S2=HIGH, S3=LOW: Heldere fotodiodes actief (zonder filtering)
- S2=HIGH, S3=HIGH: Groene fotodiodes actief
De OUT-pin levert vierkante golffrequenties in een bereik van ongeveer 2 Hz tot 500 kHz. De frequentie neemt toe met de lichtintensiteit – helderder licht levert hogere frequenties. Door de pulsduur te meten (die omgekeerd evenredig is, kortere duur betekent sterker licht) kunnen we deze metingen met kalibratie omzetten naar het gangbare 0–255 RGB-formaat.
Optimale Precisie Bereiken
- Houd de sensor 1-3 cm van het meetobject met stabiele hoekuitlijning
- Gebruik de geïntegreerde witte LED-verlichting voor reproduceerbare lichtomstandigheden
- Bescherm de sensor tegen wisselend omgevingslicht voor consistente metingen
Bedradingsschema
Aansluitschema TCS3200 kleursensor op Raspberry Pi:
| TCS3200 Color Sensor | Raspberry Pi |
|---|---|
| VCC | 5V |
| GND | GND |
| OUT | GPIO23 |
| S0 | GPIO8 |
| S1 | GPIO7 |
| S2 | GPIO24 |
| S3 | GPIO25 |
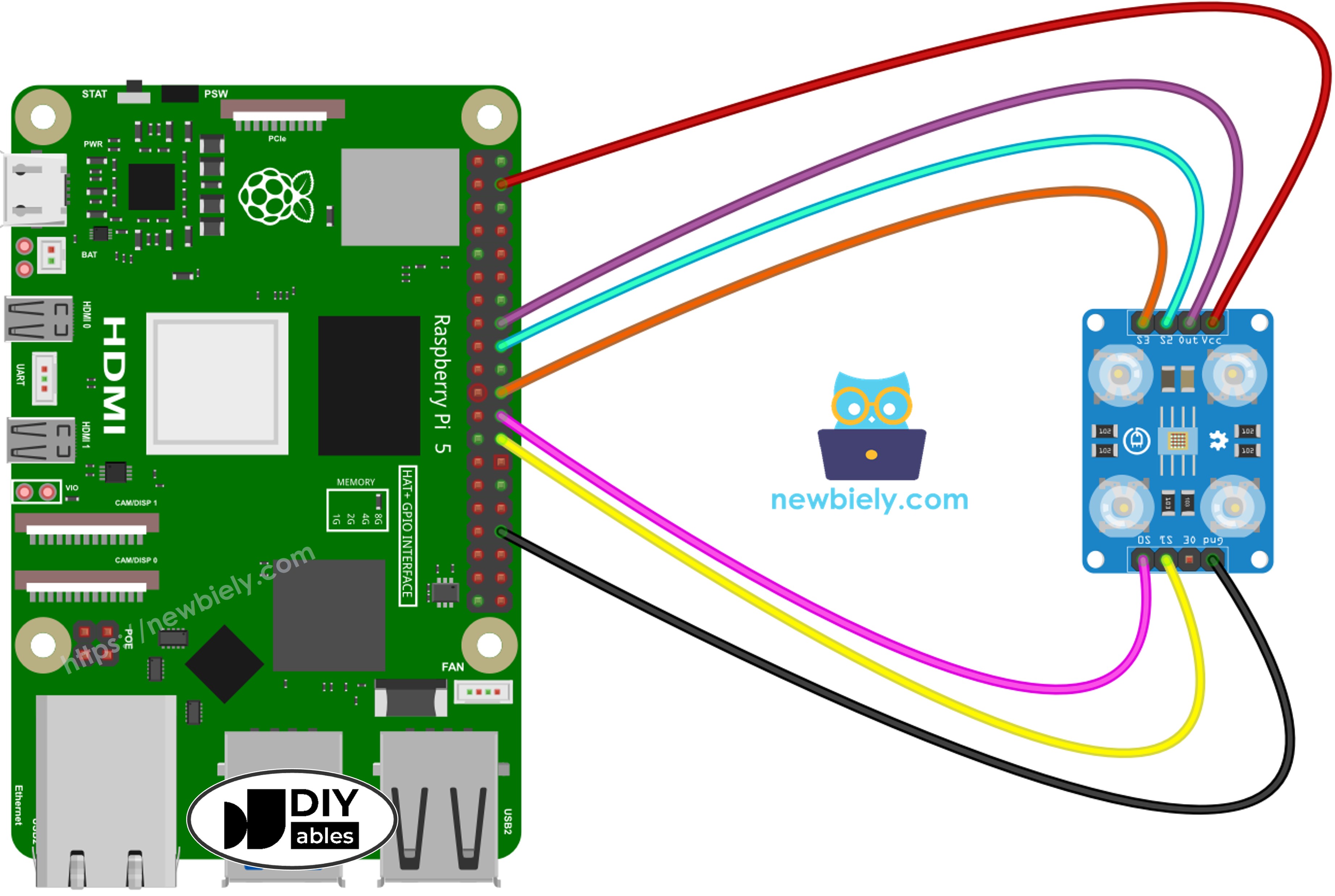
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Raspberry Pi Code - Pulsbreedte Kalibratie
Kalibratie elimineert omgevingsinvloeden uit ruwe metingen. Variabelen zoals LED-uitgangssterkte, afstand tot het meetobject, materiaalreflectie en kamerlicht beïnvloeden de uitlezing. Zie dit als systematische fouten die gemeten moeten worden. De kalibratieroutine vindt de minimum en maximum pulsbreedtes van alle kleurkanalen, waarmee referentiegrenzen worden vastgesteld om ruwe data nauwkeurig om te rekenen naar 0–255 RGB-waarden, passend bij uw omgeving.
Snel aan de slag
- Kopieer de code en sla deze op in een bestand, bijvoorbeeld tcs3200_calibration.py
- Voer het script uit:
- Richt de sensor op verschillende oppervlakken: witte materialen (printerpapier), zwarte voorwerpen, en meerkleurige objecten
- Kijk hoe Min/Max grenzen automatisch worden bijgewerkt wanneer extremen worden gedetecteerd
- Zodra de waarden stabiel lijken (meestal na 10-20 seconden), druk op Ctrl+C om te stoppen
- Noteer alle zes kalibratieparameters die worden weergegeven
Voorbeeld kalibratieparameters uit bovenstaande output:
- RedMin = 42, redMax = 210
- GreenMin = 55, greenMax = 185
- BlueMin = 60, blueMax = 172
Raspberry Pi Code - RGB Waarde Meting
Snel aan de slag
- Zoek in het begin van de code de kalibratievariabelen:
- Vervang alle zes nulwaarden door de gemeten kalibratiedata. Voorbeeld met waarden redMin = 42, redMax = 210, greenMin = 55, greenMax = 185, blueMin = 60, blueMax = 172:
- Sla de aangepaste code op, bijvoorbeeld als tcs3200_sensor.py
- Voer het script uit:
- Plaats een gekleurd proefobject voor de sensor
- Bekijk de RGB-uitvoer in de terminal
De weergegeven RGB-waarden zijn conform de standaard 0-255 schaal. Kortere pulsbreedtes (duidend op helder reflecterend licht) geven hogere RGB-waarden; langere pulsbreedtes (minder reflectie) resulteren in lagere waarden.
Project Toepassingen
Met een operationele RGB-meting kunt u ontwikkelen:
- Chromatisch sorteersysteem: Objecten categoriseren op kleur (rood/groen/blauw onderscheid)
- Kleurverificatie-apparaat: Consistentie van kleuren tussen monsters bevestigen
- Gekleurde routevolger: Robots die lijnen of markers in diverse kleuren volgen
- Visuele kwaliteitscontrole: Productiefouten detecteren via kleuranalyse
- Kleurgestuurde automatisering: Acties uitvoeren bij detectie van specifieke kleuren
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten en aanvullingen bij het gebruik en de toepassing van de TCS3200D/TCS230 kleursensor met Raspberry Pi.