Arduino Nano - Feedback Actuator
Feedback Actuator
In een eerdere tutorial hebben we de lineaire actuator zonder feedback besproken. Nu gaan we de feedback lineaire actuator verkennen (ook wel feedback linear actuator genoemd). Dit type actuator geeft informatie terug waarmee de positie van zijn slag bepaald kan worden en vervolgens bestuurd kan worden. We bekijken onder meer:
- Hoe een feedback lineaire actuator werkt
- Hoe u de positie van een feedback lineaire actuator (in millimeters) kunt vaststellen
- Hoe u de positie van een feedback lineaire actuator kunt aansturen
Benodigde Hardware
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over de Feedback Lineaire Actuator
Een lineaire actuator met feedback is voorzien van een signaal waarmee zijn positie kan worden vastgesteld en aangestuurd. Deze feedback komt van een potentiometer die een spanningswaarde levert die evenredig is aan de positie van de slag.
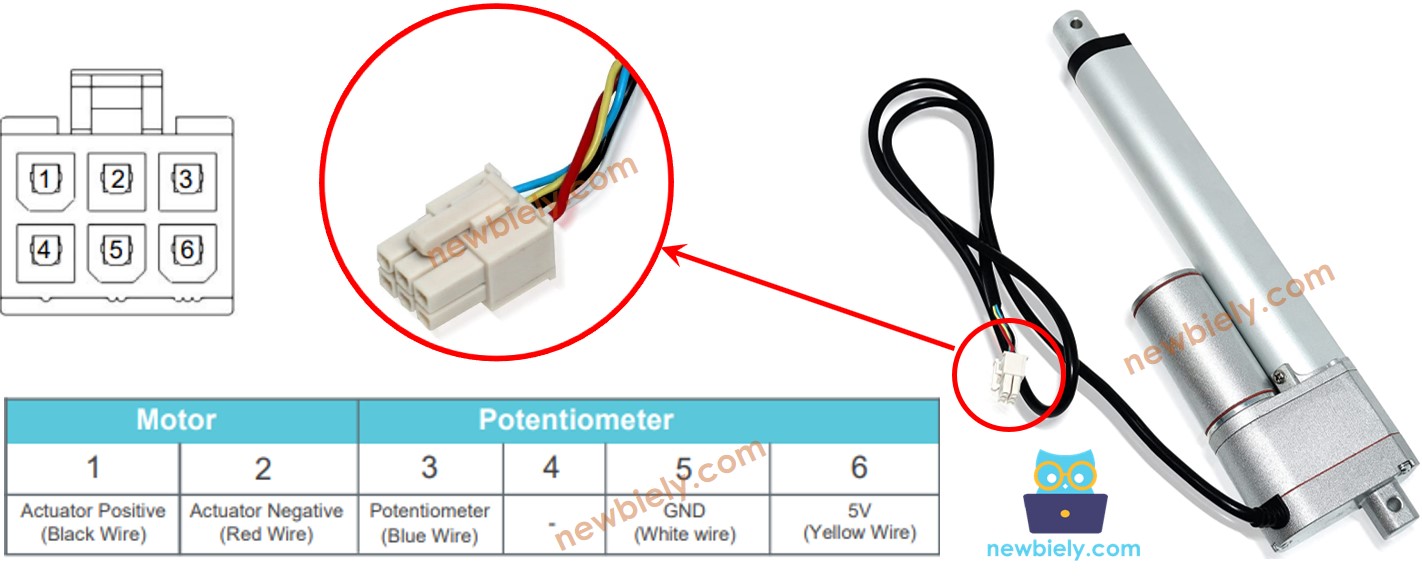
Feedback Lineaire Actuator Pinout
Een feedback lineaire actuator heeft 5 draden:
- Actuator Positieve draad: Deze draad wordt gebruikt om de actuator aan te sturen met een hoge spanning (12V, 24V, 48V...).
- Actuator Negatieve draad: Deze draad wordt gebruikt om de actuator aan te sturen met een hoge spanning (12V, 24V, 48V...).
- 5V draad: deze draad is voor de feedback potentiometer. Verbind deze met 5V of 3.3V.
- GND draad: deze draad is voor de feedback potentiometer. Verbind deze met GND.
- Potentiometer draad: (ook feedback draad of output draad genoemd) deze draad levert een spanningswaarde die in verhouding staat tot de positie van de slag.
Hoe werkt het
Wanneer we hoge spanning aanleggen op de positieve en negatieve draden, zal de actuator uitschuiven of inklappen. Concreet:
- Wanneer 12V (of 24V, 48V...) op de positieve draad wordt aangesloten en GND op de negatieve draad, schuift de lineaire actuator met volle snelheid uit tot de eindlimiet wordt bereikt.
- Wanneer 12V (of 24V, 48V...) op de negatieve draad wordt aangesloten en GND op de positieve draad, trekt de lineaire actuator met volle snelheid in tot de eindlimiet wordt bereikt.
- Als de voeding uitgeschakeld wordt (GND op zowel positieve als negatieve draad), stopt de actuator met uitschuiven/inklapppen.
※ Notiz:
- De vereiste spanning voor het bedienen van de actuator is afhankelijk van de specificaties. Raadpleeg de datasheet of handleiding voor de exacte spanningswaarde.
- Ook wanneer de voeding uit staat, kan de actuator zijn positie behouden terwijl hij belast wordt.
De spanning op de potentiometerdraad is gerelateerd aan de positie van de slag op de actuator. Door deze spanning te meten kan de positie bepaald worden.
Aansluitschema
Verwijder alle drie de jumpers van de L298N module voordat u de draden aansluit.
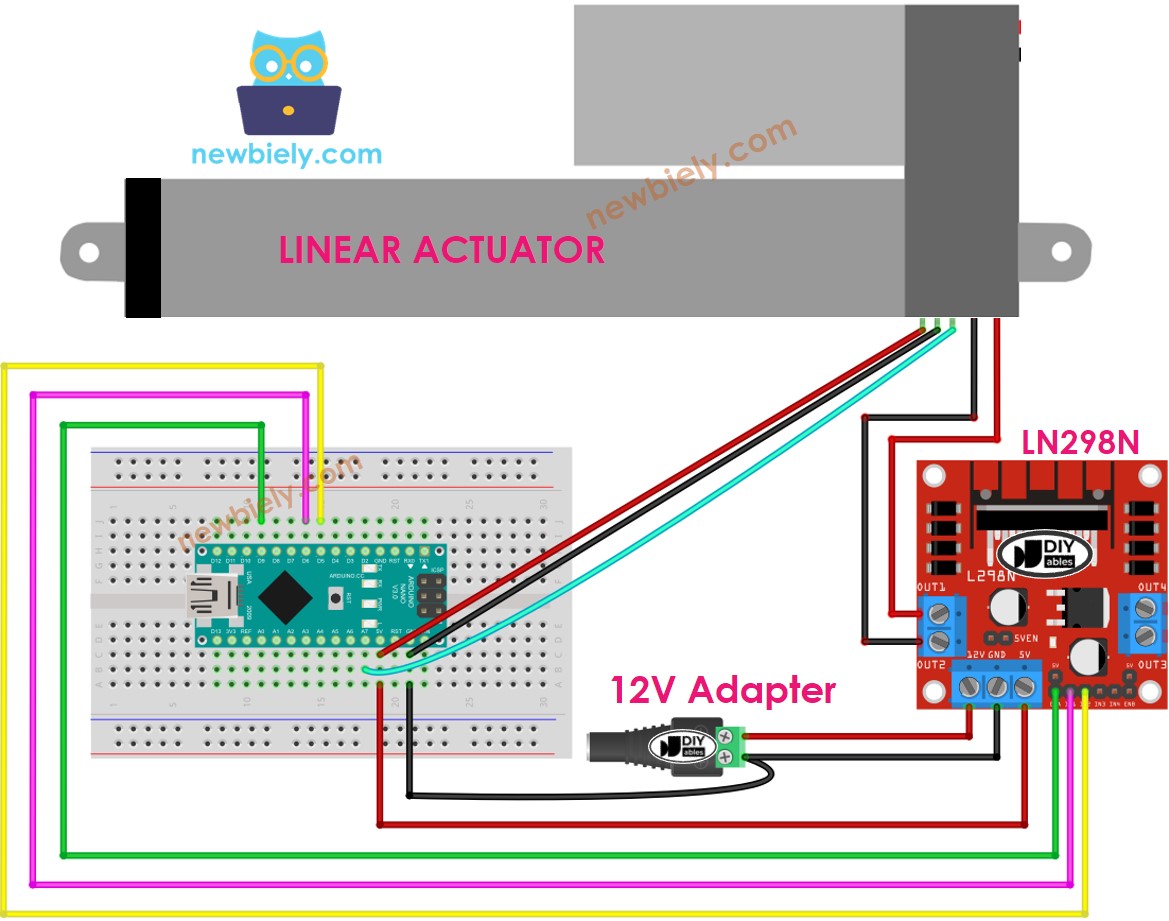
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Hoe u een lineaire actuator uitschuift/ inklapt
Bekijk de tutorial over Arduino Nano - Actuator.
Hoe u de positie van de lineaire actuator bepaalt
Hier ziet u een voorbeeld van hoe u de slag van een lineaire actuator kunt lokaliseren. Het laat zien hoe dit in zijn werk gaat.
Calibratie
- Bepaal de lengte van de slag van de actuator (in millimeters) door deze te meten met een liniaal of te raadplegen in de datasheet.
- Voer de volgende code uit om de outputwaarden te bepalen wanneer de lineaire actuator volledig is uitgeschoven en volledig is ingeschoven.
- Houd de log in de Serial Monitor in de gaten zoals hieronder weergegeven.
Noteer de drie waarden hieronder en pas ze aan in de code: de minimum- en maximumwaarde, en IN1_PIN en IN2_PIN. Als minimum en maximum omgedraaid zijn, verwissel dan ook IN1_PIN en IN2_PIN.
Arduino Nano code die de positie van de actuator berekent
- Werk de drie gekalibreerde waarden in de code bij.
- Upload de code naar de Arduino Nano.
- Bekijk de resultaten in de Serial Monitor.
Hoe u een lineaire actuator naar een specifieke positie aanstuurt
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.