Arduino Nano - Stappenmotor Limietschakelaar
Deze tutorial legt uit hoe u een Arduino Nano gebruikt om een stappenmotor te bedienen via een limietschakelaar en een L298N driver. Specifiek behandelen we:
- Hoe u de Arduino Nano programmeert om de stappenmotor te stoppen wanneer een limietschakelaar wordt ingedrukt.
- Hoe u de Arduino Nano programmeert om de draairichting van de stappenmotor te veranderen bij aanraking van een limietschakelaar.
- Hoe u de Arduino Nano programmeert om de draairichting van de stappenmotor te veranderen met twee limietschakelaars die tegenover elkaar zijn geplaatst.
Hardware Vereist
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over Stappenmotor en Limietschakelaar
Als u niet vertrouwd bent met de stappenmotor en limietschakelaar (inclusief pinout, functionaliteit en programmeren), kunnen de volgende tutorials u helpen dit te leren:
- Arduino Nano - Limietschakelaar tutorial
- Arduino Nano - Stappenmotor tutorial
Bedradingsschema
Deze tutorial biedt het bedradingsschema voor twee situaties: één stappenmotor + één limietschakelaar, en één stappenmotor + twee limietschakelaars.
- Bedradingsschema tussen Arduino Nano, stappenmotor en een limietschakelaar.
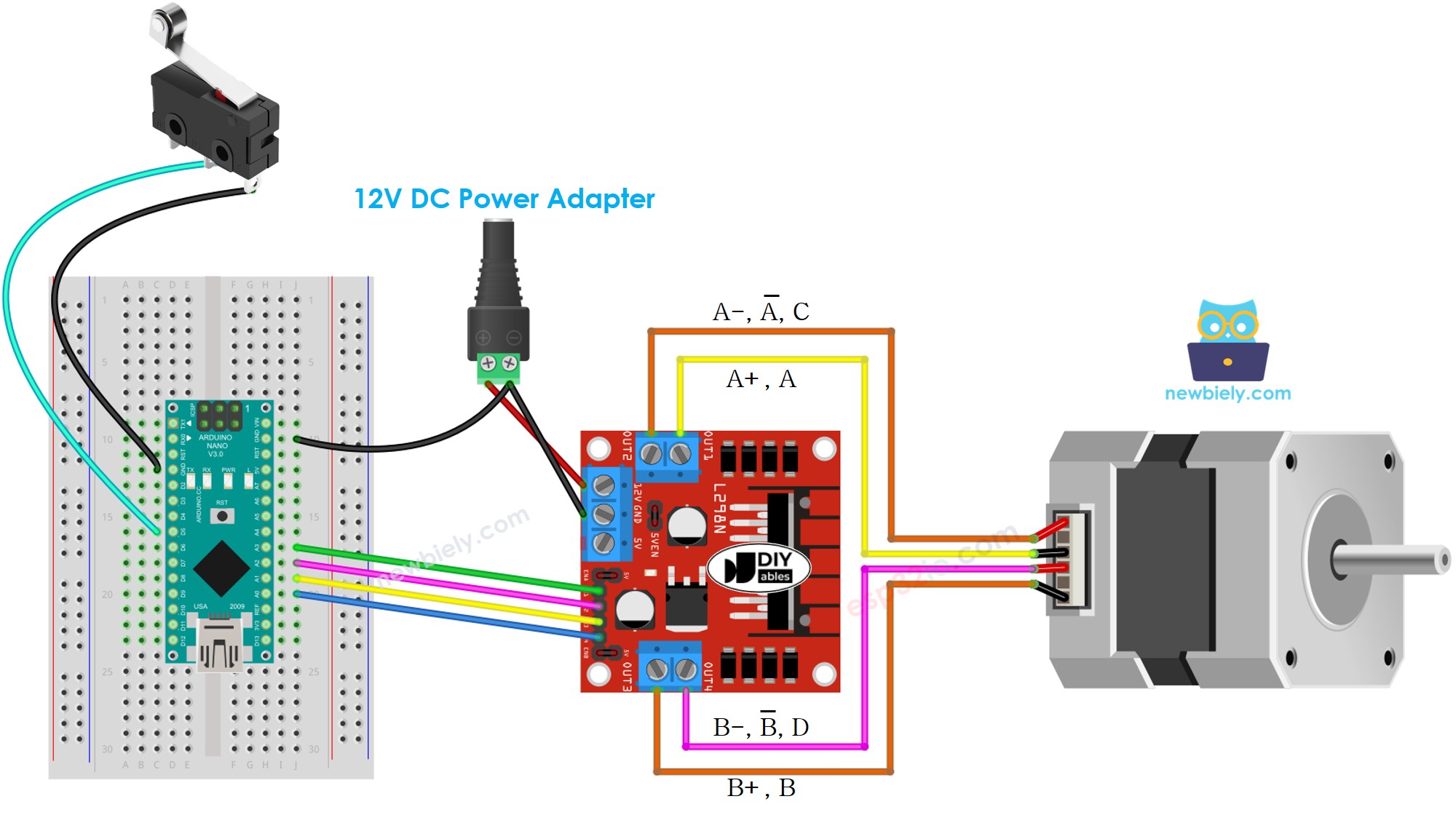
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
- Bedradingsschema tussen Arduino Nano, stappenmotor en twee limietschakelaars.
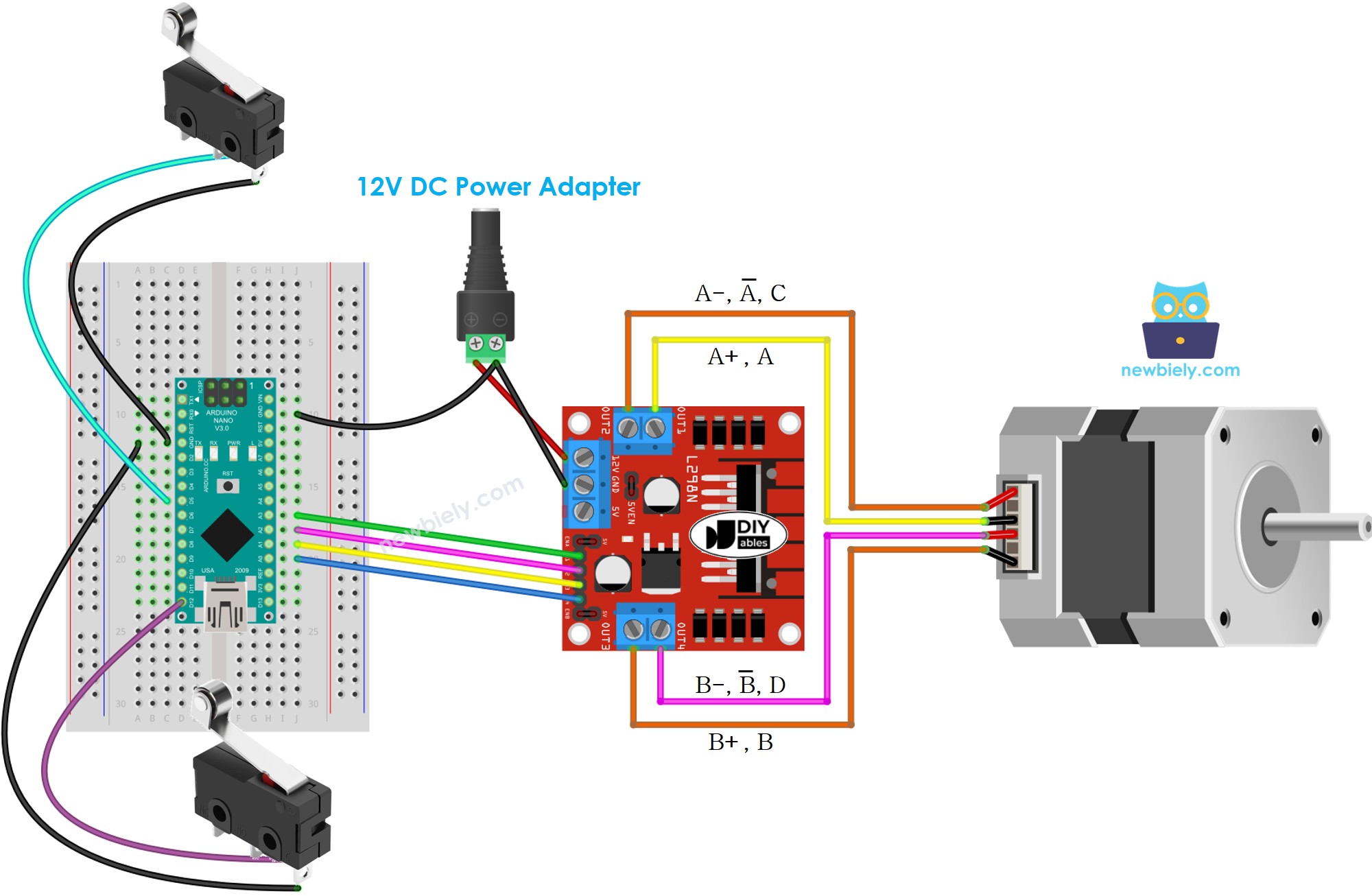
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
※ Notiz:
De bedradingsverbinding tussen de stappenmotor en de L298N kan variëren afhankelijk van het type stappenmotor. Raadpleeg voor een succesvolle verbinding de tutorial Arduino Nano - Stappenmotor voor instructies over het aansluiten van de stappenmotor op de L298N motor driver.
Arduino Nano Code - Stappenmotor Stoppen met Limietschakelaar
Een stappenmotor kunt u op verschillende manieren stoppen:
- Gebruik de stepper.stop() functie: Dit zorgt niet voor een onmiddellijke stop, maar laat de motor geleidelijk vertraagt stoppen.
- Roep de stepper.run() functie niet aan: Dit zorgt ervoor dat de stappenmotor direct stopt.
De onderstaande code laat een stappenmotor continu draaien totdat de limietschakelaar wordt ingedrukt.
Snelle Stappen
- Verbind de Arduino Nano met een computer via een USB-kabel.
- Open de Arduino IDE, kies het juiste bord en de juiste poort.
- Klik op het Libraries icoon in de linkerzijbalk van de Arduino IDE.
- Zoek naar “ezButton” en vind de button library van ArduinoGetStarted.com.
- Druk op de Installeren knop om de ezButton bibliotheek te installeren.

- Zoek naar “AccelStepper” en vind de AccelStepper bibliotheek gemaakt door Mike McCauley.
- Druk daarna op de Installeren knop om deze toe te voegen.

- Kopieer de code hierboven en open deze in de Arduino IDE.
- Klik in de Arduino IDE op de Upload knop om de code te compileren en te uploaden naar de Arduino Nano.
- Als de bedrading correct is, zal de motor met de klok mee draaien.
- Wanneer de limietschakelaar wordt ingedrukt, stopt de motor direct.
- De output in de Seriële Monitor ziet er als volgt uit.
Code Uitleg
Bekijk de regel-voor-regel uitleg in de commentaarregels van de broncode!
Arduino Nano Code - Draairichting Stappenmotor Veranderen met Limietschakelaar
Een stappenmotor draait continu en de draairichting wordt veranderd wanneer een limietschakelaar wordt ingedrukt. Dit wordt gerealiseerd met de volgende code:
Snelle Stappen
- Kopieer de code en open deze met de Arduino IDE.
- Klik in de IDE op de Upload knop om de code naar de Arduino Nano te uploaden.
- Als de bedrading correct is, draait de motor met de klok mee.
- Druk de limietschakelaar in en de draairichting van de stappenmotor wordt omgedraaid naar tegen de klok in.
- Druk de limietschakelaar opnieuw in en de stappenmotor draait weer met de klok mee.
- De output in de Seriële Monitor ziet er als volgt uit.
Arduino Nano Code - Draairichting Stappenmotor Veranderen met twee Limietschakelaars
Laat een stappenmotor continu draaien en wijzig de draairichting wanneer één van de twee limietschakelaars wordt ingedrukt.
Snelle Stappen
- Kopieer de bovenstaande code en open deze in de Arduino IDE.
- Klik op de Upload knop om de code naar de Arduino Nano te verzenden.
- Als de bedrading correct is, zal de motor met de klok mee draaien.
- Bij indrukken van limietschakelaar 1, zal de draairichting van de stappenmotor worden omgedraaid naar tegen de klok in.
- Bij indrukken van limietschakelaar 2 zal de draairichting weer veranderen naar met de klok mee.
- De output in de Seriële Monitor ziet er als volgt uit.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.