Arduino UNO R4 - Actuator
Ontdek hoe u de Arduino Uno R4 kunt gebruiken om een lineaire actuator te besturen in deze eenvoudige handleiding! Perfect voor beginners, deze gids toont u hoe u een L298N driver kunt gebruiken voor leuke DIY-projecten. Dit is wat u zult leren:
- Wat een lineaire actuator is en hoe deze beweegt
- Eenvoudige stappen om de actuator uit te laten schuiven of in te laten trekken
- Eenvoudige bedrading met de L298N driver
- Duidelijke Arduino-code om de actuator te besturen
- Hoe u de snelheid van de actuator kunt aanpassen om sneller of langzamer te bewegen
Deze handleiding gaat over lineaire actuatoren zonder feedback. Als u wilt leren over lineaire actuatoren met feedback, bezoek dan onze Arduino UNO R4 - Actuator with Feedback gids. Volg dit eenvoudige Arduino-project om uw eigen slimme automatiseringssysteem te bouwen!
Hardware Vereist
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V4 IoT Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over de Lineaire Actuator
Lineaire Actuator Pinout
Een lineaire actuator heeft twee draden.
- Positieve draad: vaak rood
- Negatieve draad: vaak zwart

Hoe het Werkt
Bij het kopen van een lineaire actuator is het belangrijk te begrijpen op welke spanning deze werkt. Beschouw bijvoorbeeld een lineaire actuator die 12 volt gebruikt.
Wanneer u de 12V lineaire actuator aansluit op een 12V voeding:
- Sluit 12V aan op de positieve draad en GND op de negatieve draad: de lineaire actuator schuift volledig uit op hoge snelheid tot deze stopt bij zijn limiet.
- Sluit 12V aan op de negatieve draad en GND op de positieve draad: de lineaire actuator trekt volledig in op hoge snelheid tot deze stopt bij zijn limiet.
Wanneer u de stroom naar de actuator afsluit door zowel de positieve als negatieve draad aan de grond te verbinden, stopt de actuator met in- of uitbewegen.
※ Notiz:
Voor DC-motoren, servomotoren en stappenmotoren zonder versnellingen kunnen zij hun positie niet behouden wanneer de stroom wordt uitgeschakeld en zij een belasting dragen. Een actuator kan echter zijn positie behouden zelfs zonder stroom wanneer hij een belasting draagt.
Als we minder dan 12V gebruiken voor lineaire actuatoren, werken ze nog steeds maar niet op hun snelste snelheid. Dit toont aan dat het aanpassen van de voedingsspanning de snelheid van de lineaire actuator kan regelen. Het nauwkeurig regelen van de spanning is echter moeilijk, dus deze methode wordt niet vaak gebruikt. In plaats daarvan wordt de spanning constant gehouden en wordt de snelheid van de lineaire actuator geregeld met een PWM-signaal. Wanneer de PWM duty cycle hoger is, beweegt de lineaire actuator sneller.

Hoe een Lineaire Actuator Besturen met Arduino Uno R4
Om een lineaire actuator te besturen, willen we meestal:
- Deze laten uitschuiven op volle snelheid
- Deze laten intrekken op volle snelheid
- (Optioneel) Regelen hoe snel deze in- of uitbeweegt
De Arduino kan besturingssignalen verzenden, maar deze signalen zijn te zwak (lage spanning en stroom) om de actuator direct te bewegen. Daarom hebben we een driver nodig tussen de Arduino en de actuator.
De driver heeft twee hoofdtaken:
- Het versterkt de signalen van de Arduino zodat deze de actuator kan aandrijven.
- Het schakelt de stroomrichting om (door de polariteit te veranderen) op basis van een ander signaal van de Arduino — dit regelt of de actuator uitschuift of intrekt.
※ Notiz:
- U kunt deze gids gebruiken voor elke lineaire actuator. Wij gebruiken een 12V lineaire actuator als voorbeeld.
- Bij het gebruiken van een 5V lineaire actuator met een Arduino UNO R4, ook al gebruiken beide 5V, moet u een driver toevoegen. Dit komt omdat de Arduino UNO R4 niet genoeg stroom kan leveren voor de actuator.
Deze gids gebruikt de L298N driver, maar er zijn verschillende andere chips en modules, zoals L293D, die ook lineaire actuatoren kunnen besturen.
Over de L298N Driver
De L298N Driver kan apparaten zoals lineaire actuatoren, DC-motoren en stappenmotoren besturen. In deze handleiding laten we zien hoe u deze kunt gebruiken om een lineaire actuator te besturen.
L298N Driver Pinout
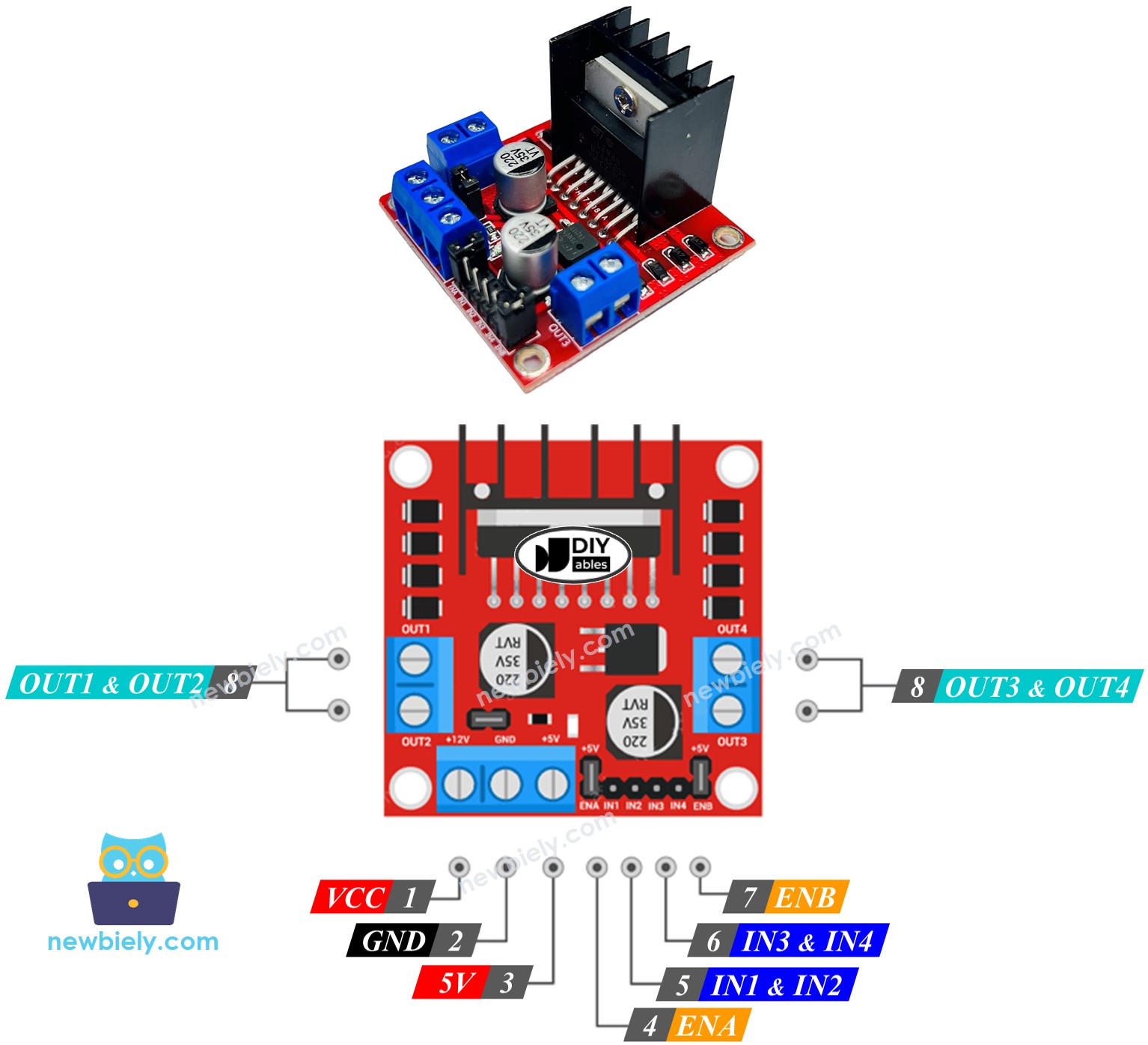
De L298N Driver heeft twee afzonderlijke kanalen, bekend als kanaal A en kanaal B. Deze opzet stelt de L298N Driver in staat om twee verschillende lineaire actuatoren onafhankelijk en gelijktijdig te beheren. Stel dat lineaire actuator A verbonden is met kanaal A en lineaire actuator B met kanaal B. De L298N Driver bestaat uit 13 pinnen.
De gemeenschappelijke pinnen voor beide kanalen:
- VCC pin: levert stroom aan de lineaire actuator. Accepteert een bereik van 5 tot 35V.
- GND pin: dient als gemeenschappelijke massa en moet verbonden worden met GND (0V).
- 5V pin: voedt de L298N module. U kunt 5V van een Arduino UNO R4 hiervoor gebruiken.
Kanaal A pinnen:
- ENA pinnen: helpen te regelen hoe snel lineaire actuator A beweegt. Als u de jumper verwijdert en deze pin verbindt met een PWM-ingang, kunt u de snelheid aanpassen waarmee deze uitschuift of intrekt.
- IN1 & IN2 pinnen: bepalen de richting waarin de lineaire actuator beweegt. Als één pin HIGH is en de andere LOW, zal de actuator uitschuiven of intrekken. Als beide HIGH of beide LOW zijn, stopt de actuator met bewegen.
- OUT1 & OUT2 pinnen: zijn verbonden met lineaire actuator A.
Kanaal B pinnen:
- ENB pinnen: Deze pinnen regelen de snelheid van lineaire actuator B. Verwijder de jumper en gebruik een PWM-ingang met deze pin om te regelen hoe snel lineaire actuator B uitschuift of intrekt.
- IN3 & IN4 pinnen: Deze pinnen bepalen de richting van de beweging van een lineaire actuator. Als één pin HIGH is en de andere LOW, zal de lineaire actuator uitschuiven of intrekken. Als beide pinnen HIGH of LOW zijn, stopt de lineaire actuator.
- OUT3 & OUT4 pinnen: Deze zijn verbonden met een lineaire actuator.
De L298N driver heeft twee soorten invoerstroom:
- Eén voor de lineaire actuator (VCC en GND pinnen): van 5 tot 35V.
- Eén voor de interne werking van de L298N module (5V en GND pinnen): van 5 tot 7V.
De L298N driver wordt geleverd met drie jumpers voor speciale of verschillende toepassingen. Voor eenvoud, verwijder alle jumpers van de L298N driver.
We kunnen twee lineaire actuatoren onafhankelijk en gelijktijdig beheren met een Arduino UNO R4 en een L298N Driver. Om elke lineaire actuator te bedienen, hebben we slechts drie pinnen van de Arduino UNO R4 nodig.
※ Notiz:
Dit deel van de gids toont hoe u kanaal A gebruikt om een lineaire actuator te besturen. Het besturen van een andere lineaire actuator werkt op een vergelijkbare manier.
Hoe een Lineaire Actuator Te Besturen
We leren hoe u de L298N driver kunt gebruiken om een Lineaire Actuator te besturen.
Bedradingsschema
Voordat u begint met bedraden, verwijder alle drie jumpers van de L298N module.
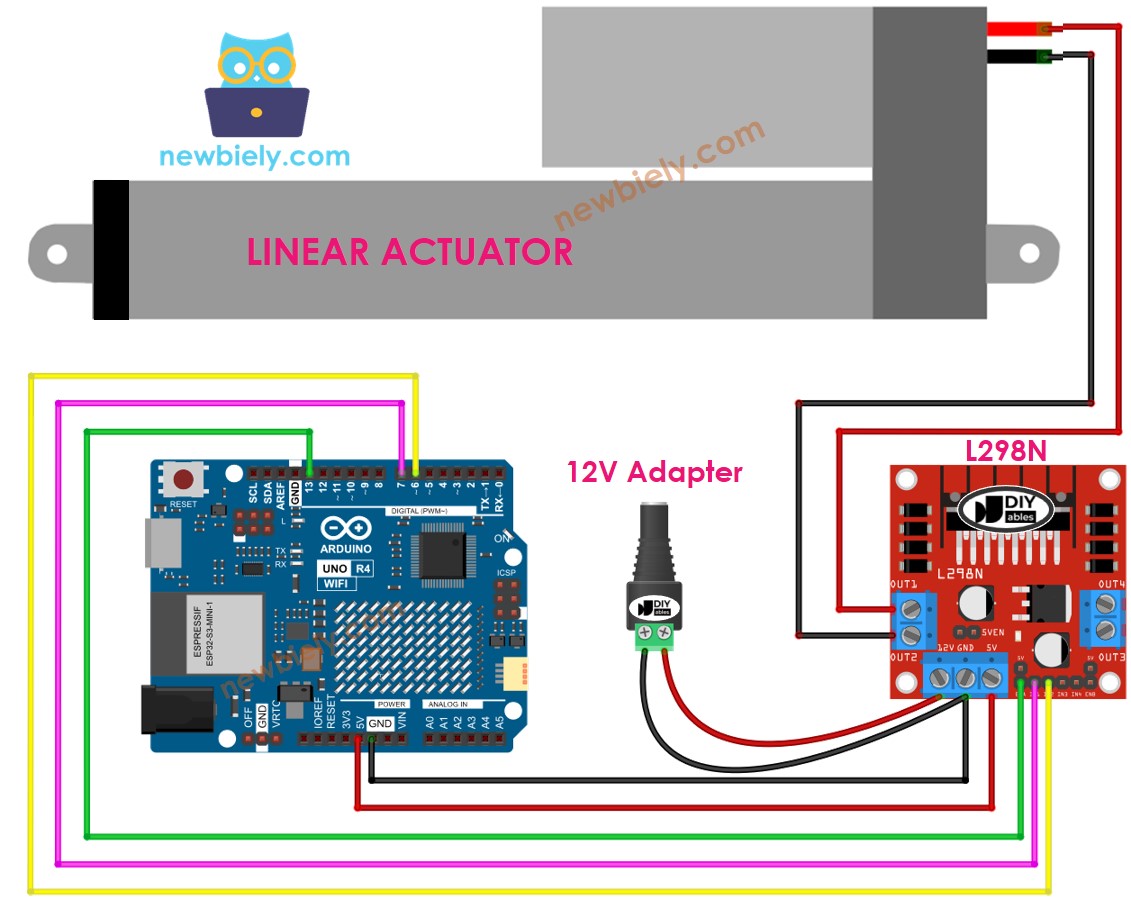
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Zie De beste manier om Arduino Uno R4 en andere componenten van stroom te voorzien.
Hoe de Lineaire Actuator Te Laten Uitschuiven/Intrekken
U kunt de richting van een Lineaire Actuator regelen door de IN1 en IN2 pinnen op HIGH of LOW te zetten. De onderstaande tabel toont hoe u dit kunt doen voor beide kanalen.
| IN1 pin | IN2 pin | Richting |
|---|---|---|
| LOW | LOW | Lineaire Actuator A stopt |
| HIGH | HIGH | Lineaire Actuator A stopt |
| HIGH | LOW | Lineaire Actuator A schuift uit |
| LOW | HIGH | Lineaire Actuator A trekt in |
- Lineaire Actuator A uitschuiven
- Lineaire actuator A trekt in.
※ Notiz:
Als de OUT1 en OUT2 pinnen verkeerd verbonden zijn met de lineaire actuator, wordt de richting omgekeerd. Om dit op te lossen, wissel eenvoudig de posities van de OUT1 en OUT2 pinnen of verander de besturingssignalen op de IN1 en IN2 pinnen in het programma.
Hoe de Lineaire Actuator Te Stoppen met Uitschuiven of Intrekken
De lineaire actuator stopt automatisch met in- of uitbewegen wanneer hij zijn maximum of minimum punt bereikt. We kunnen hem ook laten stoppen voordat hij deze punten bereikt.
Er zijn twee methoden om een lineaire actuator te stoppen.
- Zet de snelheid op nul
- Zet IN1 en IN2 pinnen op hetzelfde niveau (LOW of HIGH).
- Of
Hoe de Snelheid van de Lineaire Actuator Te Regelen via L298N Driver
Om de snelheid van de lineaire actuator eenvoudig aan te passen, gebruik een PWM-signaal op de ENA pin in plaats van deze op HIGH te zetten. Zo kunt u het doen:
- Verbind een Arduino UNO R4 pin met de ENA pin op de L298N module.
- Gebruik de analogWrite() functie om een PWM-signaal naar de ENA pin te sturen. De L298N driver zal dit signaal versterken om de lineaire actuator te besturen.
De snelheid kan elk getal van 0 tot 255 zijn. Bij snelheid 0 stopt de lineaire actuator. Bij snelheid 255 beweegt deze op zijn snelste snelheid.
Arduino UNO R4 Voorbeeldcode
Deze code voert de volgende taken uit:
- Beweeg de actuator uit zo snel mogelijk
- Stop de actuator
- Beweeg de actuator terug in zo snel mogelijk
- Stop de actuator
Snelle Stappen
Volg deze instructies stap voor stap:
- Als dit uw eerste keer is met de Arduino Uno R4 WiFi/Minima, raadpleeg de handleiding over het instellen van de omgeving voor Arduino Uno R4 WiFi/Minima in de Arduino IDE.
- Bedraad de componenten volgens het gegeven schema.
- Verbind het Arduino Uno R4 board met uw computer via een USB-kabel.
- Start de Arduino IDE op uw computer.
- Selecteer het juiste Arduino Uno R4 board (bijv., Arduino Uno R4 WiFi) en COM-poort.
- Verwijder alle drie jumpers van de L298N module.
- Plak de code in Arduino IDE.
- Druk op de Upload knop in Arduino IDE om de code naar Arduino UNO R4 over te dragen.
- Observeer het volgende:
- De lineaire actuator schuift uit en stopt bij het bereiken van zijn limiet.
- De lineaire actuator houdt zijn positie gedurende een bepaalde tijd.
- De lineaire actuator trekt in en stopt bij het bereiken van zijn limiet.
- De lineaire actuator houdt zijn positie gedurende een bepaalde tijd.
- Deze sequentie herhaalt zich continu.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Samenvatting
In deze Arduino UNO R4 handleiding hebt u geleerd hoe u een lineaire actuator kunt besturen met een L298N driver voor DIY automatisering. Deze eenvoudige gids toonde u hoe u de actuator in en uit kunt laten bewegen, de L298N driver kunt bedraden, en zijn snelheid kunt veranderen met Arduino-programmering. Gericht op lineaire actuatoren zonder feedback, helpt dit eenvoudige Arduino-project u slimme automatiseringssystemen te bouwen. Nu kunt u deze vaardigheden gebruiken om uw eigen bewegingsregelingsprojecten te maken met Arduino UNO R4!