Arduino UNO R4 - Ultrasone Sensor - Servo Motor
In deze tutorial leren we hoe u een ultrasone sensor kunt gebruiken om een servo motor te besturen met een Arduino Uno R4 op basis van objectafstand. Wanneer een object dichtbij is, zal de servo motor naar 90 graden draaien. Wanneer het object wegbeweegt, zal de servo terugkeren naar 0 graden. Dit project is geweldig voor beginners om ultrasone afstandsmeting en servo motor besturing met Arduino Uno R4 te verkennen.
Hardware Vereist
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V4 IoT Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Ultrasone Sensor
Als u niet bekend bent met servo motors en ultrasone sensors (hun pinout, werking en programmeer-instructies), raadpleeg dan de onderstaande tutorials:
Bedradingsschema
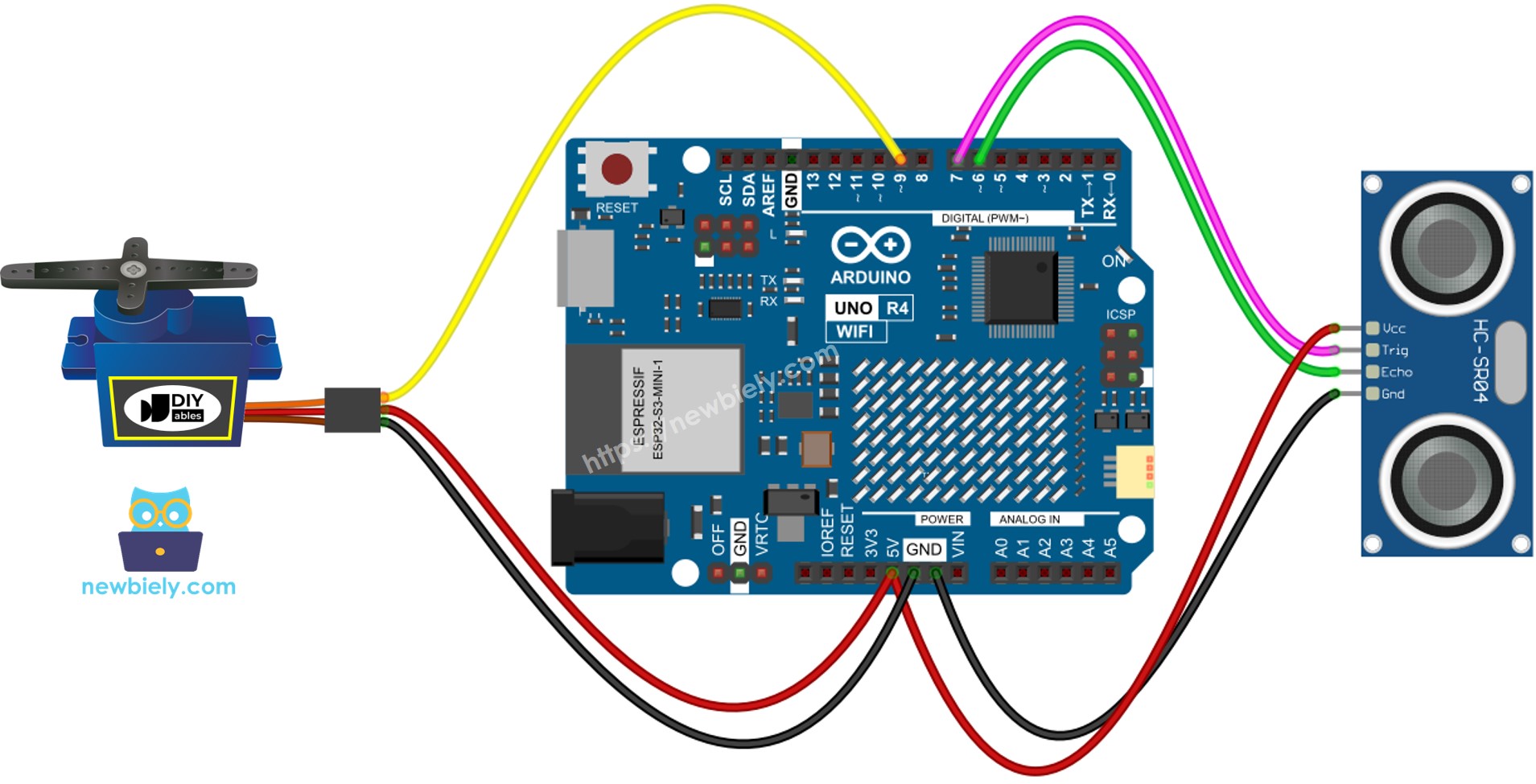
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Zie De beste manier om Arduino Uno R4 en andere componenten van stroom te voorzien.
Arduino UNO R4 Code - Ultrasone Sensor Bestuurt Servo Motor
Snelle Stappen
Volg deze instructies stap voor stap:
- Als dit uw eerste keer is met de Arduino Uno R4 WiFi/Minima, raadpleeg de tutorial over het instellen van de omgeving voor Arduino Uno R4 WiFi/Minima in de Arduino IDE.
- Verbind de servo motor en ultrasone sensor met de Arduino Uno R4 volgens het meegeleverde schema.
- Verbind het Arduino Uno R4 board met uw computer via een USB-kabel.
- Start de Arduino IDE op uw computer.
- Selecteer het juiste Arduino Uno R4 board (bijv. Arduino Uno R4 WiFi) en COM-poort.
- Kopieer en plak de bovenstaande code in de Arduino IDE.
- Druk op de Upload knop in de Arduino IDE om de code naar de Arduino UNO R4 te uploaden.
- Beweeg uw hand voor de sensor.
- Observeer hoe de servo motor reageert.
※ Notiz:
De verstrekte code is bedoeld voor leren. De ultrasone sensor wordt gemakkelijk beïnvloed door ruis. Om de ultrasone sensor effectief te gebruiken, moet u ruis verwijderen. Voor begeleiding hierover, bezoek hoe ruis filteren voor ultrasone sensor.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.