Arduino UNO R4 - Knop - Servo Motor
In deze tutorial leren we hoe we een servo motor besturen met een knop met behulp van een Arduino Uno R4. Het indrukken van de knop zal de servo motor naar 90 graden draaien, en het opnieuw indrukken beweegt deze terug naar 0 graden. Dit proces herhaalt zich elke keer dat de knop wordt ingedrukt.
De tutorial is verdeeld in twee secties:
- Zonder debouncing: De servo motor reageert op het indrukken van knoppen zonder signaalruis te behandelen.
- Met debouncing: De code bevat debounce-logica om valse triggers te voorkomen en betrouwbare knopdrukken te garanderen.
Dit project is geweldig voor beginners om servo motor controle, knop inputs en debouncing-technieken met Arduino Uno R4 te begrijpen.
Hardware Vereist
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V4 IoT Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Knop
Als u niet bekend bent met servo motors en knoppen, inclusief hun pinout, hoe ze werken, of hoe u ze programmeert, raadpleeg dan de volgende tutorials voor meer informatie.
Bedradingsdiagram
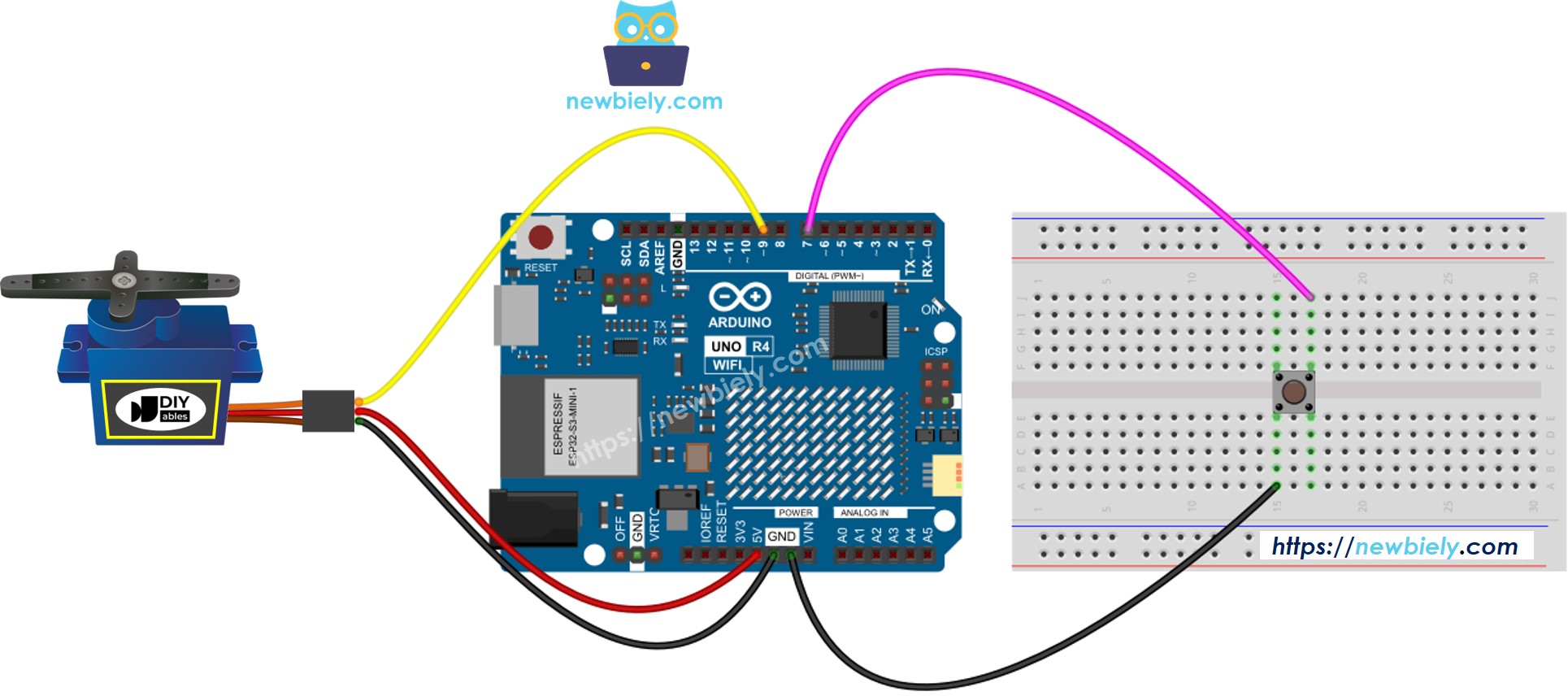
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Zie De beste manier om Arduino Uno R4 en andere componenten van stroom te voorzien.
Arduino UNO R4 Code - Knop Bestuurt Servo Motor Zonder Debouncing
Snelle Stappen
Volg deze instructies stap voor stap:
- Als dit uw eerste keer is met de Arduino Uno R4 WiFi/Minima, raadpleeg dan de tutorial over het opzetten van de omgeving voor Arduino Uno R4 WiFi/Minima in de Arduino IDE.
- Bedraad de componenten volgens het meegeleverde diagram.
- Verbind het Arduino Uno R4 board met uw computer met behulp van een USB-kabel.
- Start de Arduino IDE op uw computer.
- Selecteer het juiste Arduino Uno R4 board (bijv. Arduino Uno R4 WiFi) en COM-poort.
- Kopieer en plak de bovenstaande code in de Arduino IDE.
- Klik op de Upload knop in de Arduino IDE om de code over te dragen naar de Arduino UNO R4.
- Druk meerdere keren op de knop.
- Observeer de beweging van de servo motor.
※ Notiz:
Soms werkt de gegeven code niet goed. Om ervoor te zorgen dat het altijd correct functioneert, moeten we knop debouncing gebruiken. Knop debouncing kan uitdagend zijn voor beginners. Met behulp van de ezButton library wordt het echter veel gemakkelijker.
Arduino UNO R4 Code - Knop Bestuurt Servo Motor Met Debouncing
Waarom is debouncing belangrijk? ⇒ zie Arduino UNO R4 - Knop Debounce tutorial
Snelle Stappen
- Installeer de ezButton library. Zie Hoe Te Doen
- Kopieer de code en open deze in Arduino IDE
- Klik op de Upload knop in Arduino IDE om de code over te dragen naar Arduino UNO R4
- Druk meerdere keren op de knop
- Observeer hoe de servo motor beweegt
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.