Arduino UNO R4 - Servomotor
Deze tutorial leert u hoe u een servomotor kunt bedienen met een Arduino UNO R4. Specifiek gaan we leren:
- Arduino UNO R4 programmeren om een servomotor te besturen
- Arduino UNO R4 programmeren voor het regelen van de snelheid van de servomotor
- Externe voeding gebruiken voor servomotoren
Benodigde Hardware
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V4 IoT Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over de Servomotor
Een servomotor is een component dat zijn arm kan draaien, meestal van 0 graden tot 180 graden. Het wordt gebruikt om de hoek van een object te besturen.
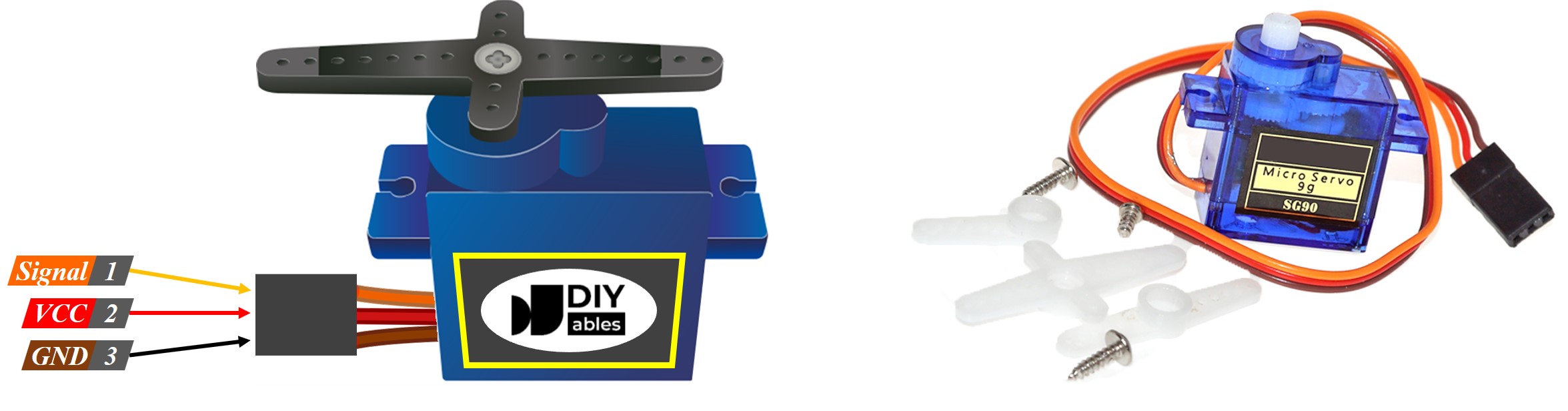
Pinout
Dit voorbeeld gebruikt een servomotor met drie pinnen:
- VCC-pin: Verbind de rode draad met VCC (5 volt).
- GND-pin: Verbind de zwarte of bruine draad met GND (0 volt).
- Signaalppin: Verbind de gele of oranje draad om het PWM-regelsignaal van een Arduino UNO R4 pin te ontvangen.
Bedradingsschema
Soms ziet u online bedradingsschema's die een verbinding tonen tussen de VCC-pin van een servomotor en de 5V-pin op het Arduino UNO R4 bord. Het is beter om deze methode te vermijden omdat dit het Arduino UNO R4 bord zou kunnen beschadigen.
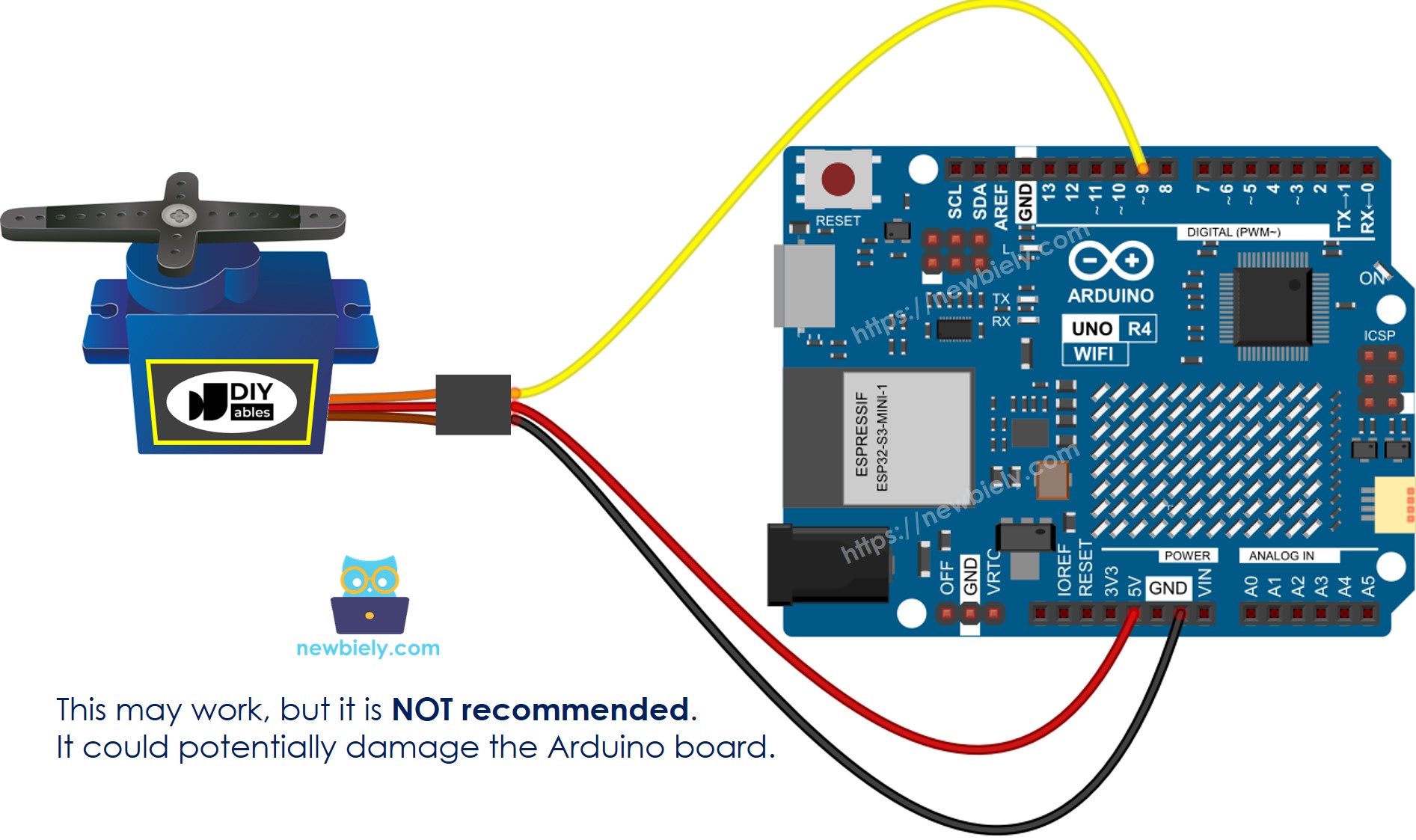
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
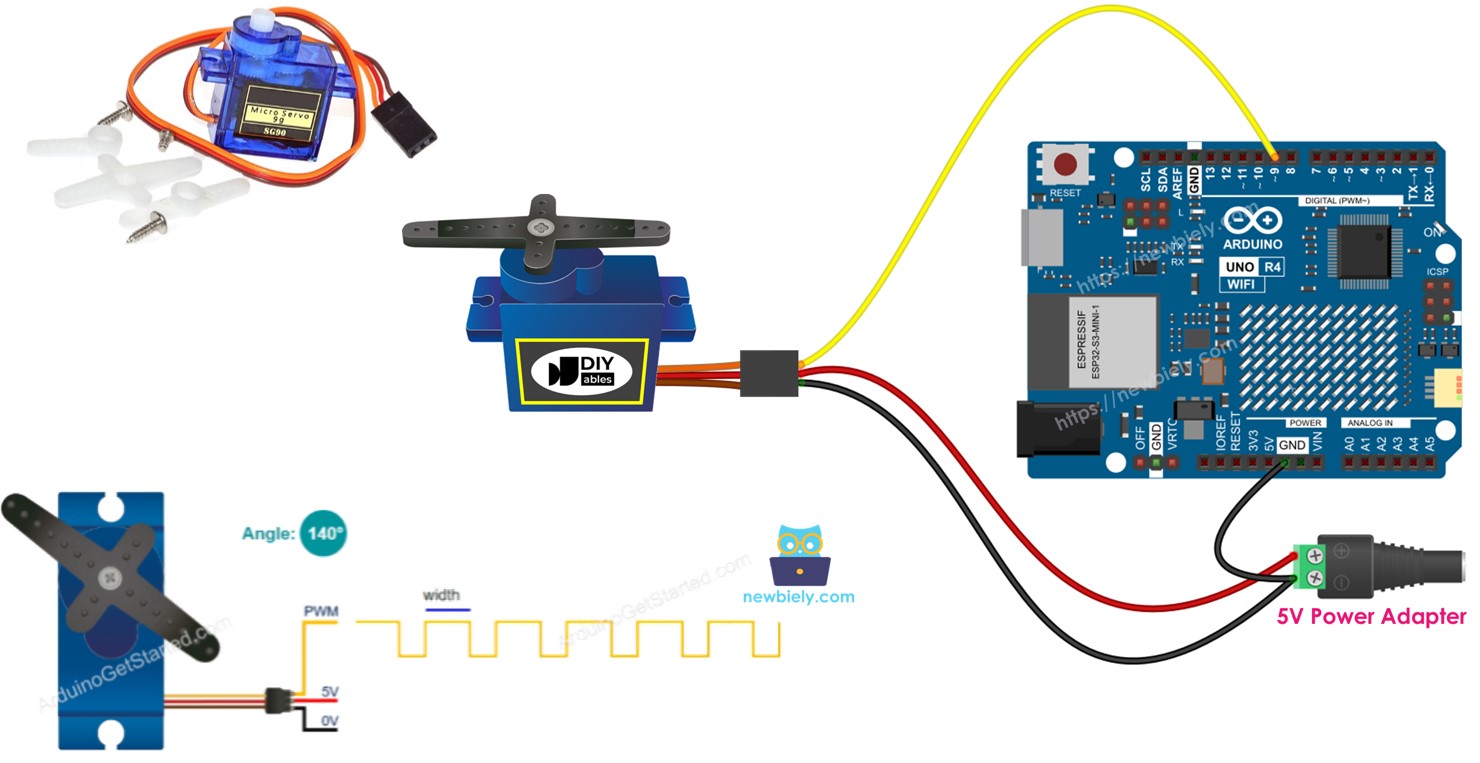
Om uw Arduino UNO R4 bord te beschermen, is het het beste om een externe voeding te gebruiken voor de servomotor. Het onderstaande bedradingsschema toont hoe u de servomotor op een externe voedingsbron aansluit.
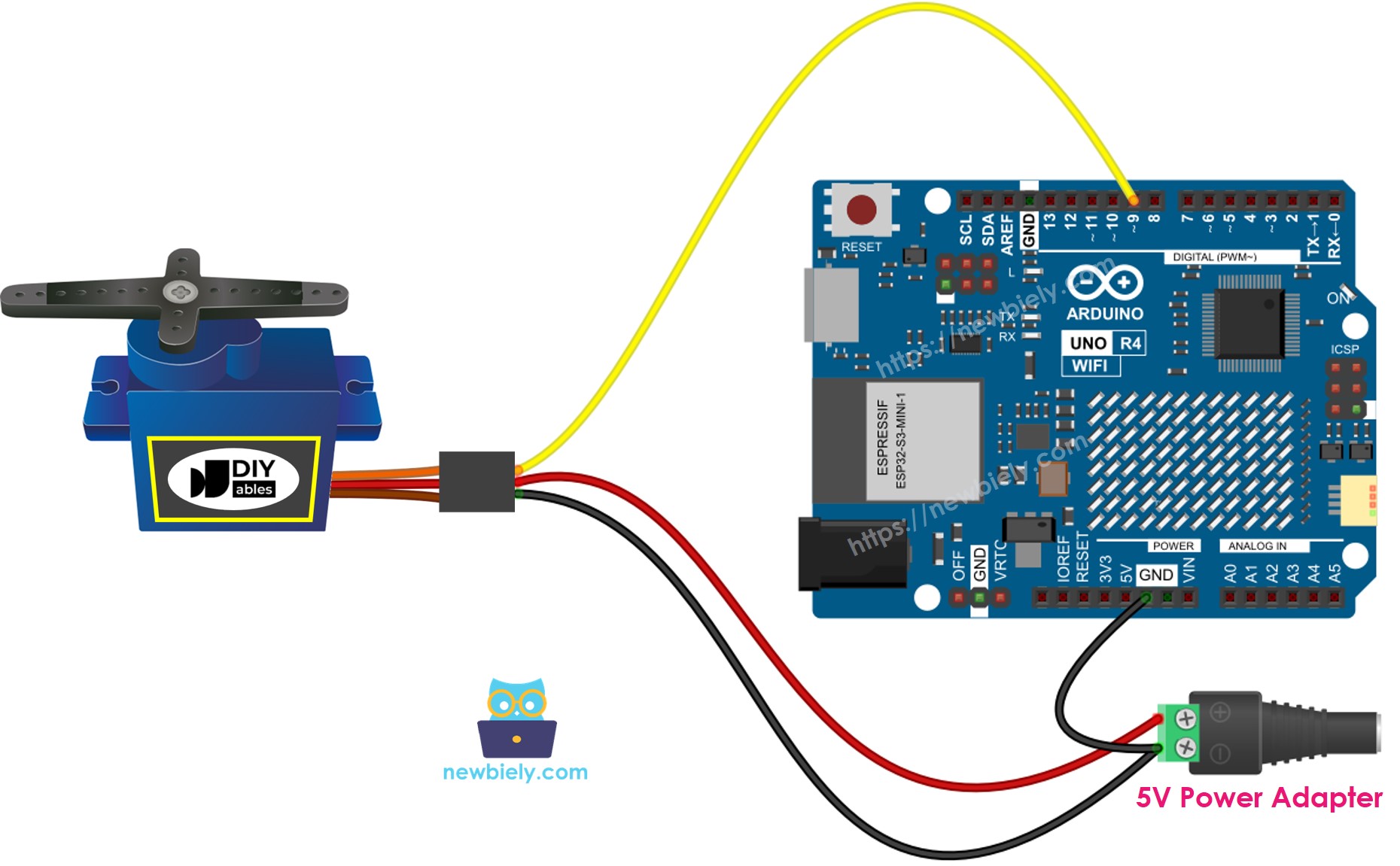
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Zie De beste manier om Arduino Uno R4 en andere componenten van stroom te voorzien.
Zorg ervoor dat u de GND (massa) van de externe voeding verbindt met de GND van het Arduino UNO R4 bord. Deze stap is zeer belangrijk voor een juiste werking.
Hoe Te Programmeren Voor Servomotor
- Voeg de bibliotheek toe:
- Maak een Servo-object aan:
Als u meerdere servomotoren beheert, declareert u eenvoudig extra Servo-objecten.
- Verbind de regelpin van de Arduino UNO R4 met de signaalpin van de servomotor, zoals pin 9.
- Tot slot, draai de servomotor naar de hoek die u nodig heeft, zoals 90 graden.
Arduino UNO R4 Code
Snelle Stappen
Volg deze instructies stap voor stap:
- Als dit uw eerste keer is met de Arduino Uno R4 WiFi/Minima, raadpleeg dan de tutorial over het instellen van de omgeving voor Arduino Uno R4 WiFi/Minima in de Arduino IDE.
- Bedrading de componenten volgens het meegeleverde schema.
- Verbind het Arduino Uno R4 bord met uw computer met een USB-kabel.
- Start de Arduino IDE op uw computer.
- Selecteer het juiste Arduino Uno R4 bord (bijv., Arduino Uno R4 WiFi) en COM-poort.
- Plak bovenstaande code in Arduino IDE.
- Druk op de Upload knop in Arduino IDE om code naar Arduino UNO R4 te verzenden.

- Bekijk wat er gebeurt: De servomotor draait langzaam van 0 naar 180 graden en draait vervolgens langzaam terug van 180 naar 0 graden.
Code Uitleg
U kunt de uitleg zien in het commentaargedeelte van de Arduino-code hierboven.
Hoe De Snelheid Van Een Servomotor Te Regelen
Het gebruik van de map() en millis() functies stelt ons in staat om de snelheid van een servomotor soepel aan te passen terwijl andere code zonder onderbrekingen kan blijven draaien.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.