Arduino WebJoystick Voorbeeld - Virtuele Joystick Besturing Tutorial
Overzicht
Het WebJoystick voorbeeld creëert een virtuele joystick interface die toegankelijk is vanuit elke webbrowser. Ontworpen voor Arduino Uno R4 WiFi en DIYables STEM V4 IoT educatief platform met verbeterde robotica mogelijkheden, ingebouwde motor besturing functies, en naadloze integratie met robotica educatieve modules. Perfect voor het besturen van robots, voertuigen, of elk systeem dat 2D positie invoer vereist.
Functies
- Virtuele Joystick: Interactieve joystick besturing via webinterface
- Real-time Coördinaten: X/Y waarden van -100 tot +100 voor precieze besturing
- Touch & Muis Ondersteuning: Werkt op desktop, tablet, en mobiele apparaten
- Configureerbare Auto-Return: Optie voor joystick om terug te keren naar het midden wanneer losgelaten
- Gevoeligheidscontrole: Instelbare gevoeligheid om overmatige updates te voorkomen
- Visuele Feedback: Real-time positie weergave en coördinaat waarden
- WebSocket Communicatie: Onmiddellijke respons zonder pagina verversing
- Middenpositie: Duidelijke middenpositie indicator voor neutrale besturing
- Platform Uitbreidbaar: Momenteel geïmplementeerd voor Arduino Uno R4 WiFi, maar kan worden uitgebreid voor andere hardware platforms. Zie DIYables_WebApps_ESP32
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V4 IoT Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Installatie Instructies
Snelle Stappen
Volg deze instructies stap voor stap:
- Als dit uw eerste keer is met de Arduino Uno R4 WiFi/DIYables STEM V4 IoT, raadpleeg de tutorial over de omgeving instellen voor Arduino Uno R4 WiFi/DIYables STEM V4 IoT in de Arduino IDE.
- Verbind het Arduino Uno R4/DIYables STEM V4 IoT board met uw computer via een USB kabel.
- Start de Arduino IDE op uw computer.
- Selecteer het juiste Arduino Uno R4 board (bijv., Arduino Uno R4 WiFi) en COM poort.
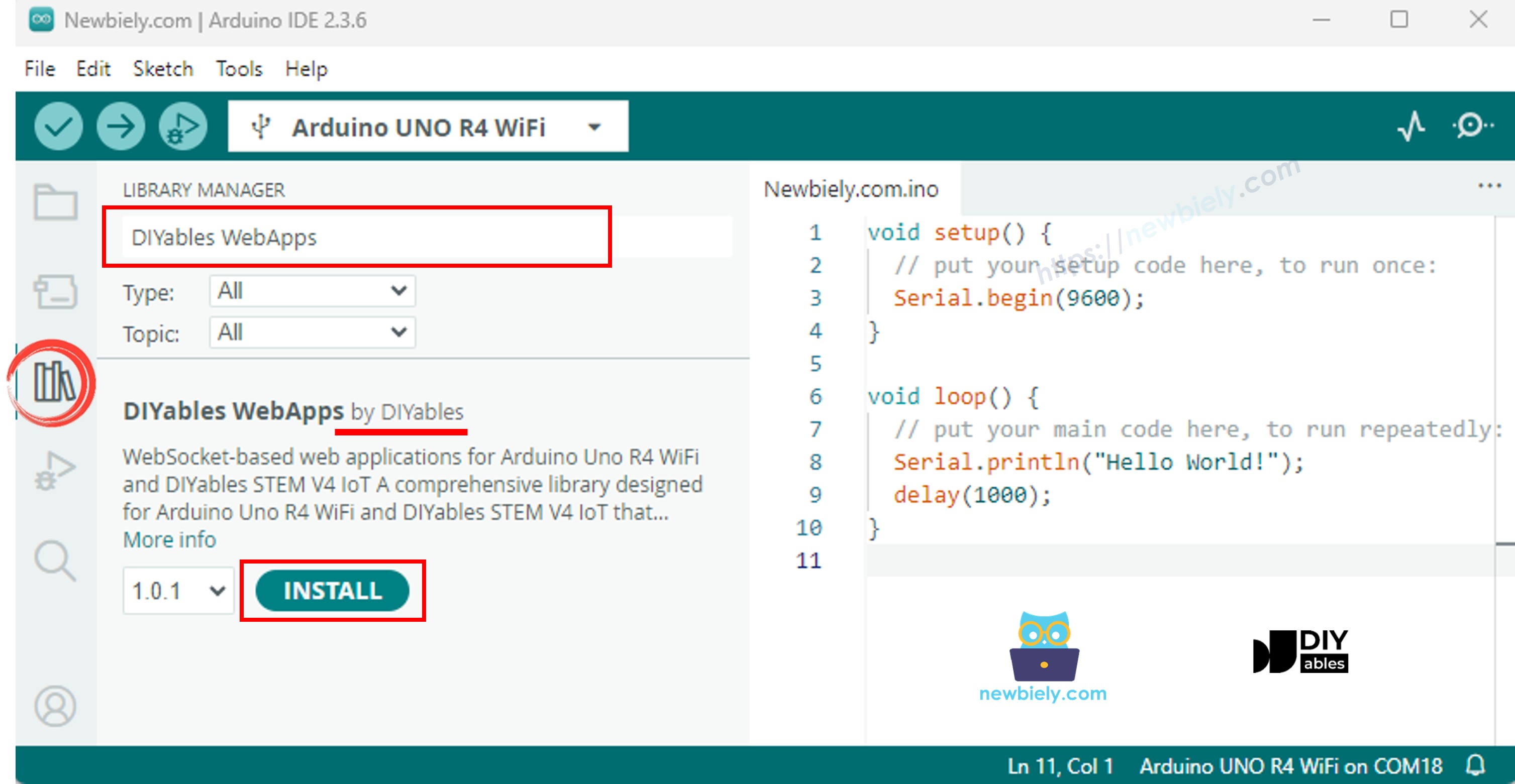
- Navigeer naar het Libraries icoon in de linker balk van de Arduino IDE.
- Zoek "DIYables WebApps", vind vervolgens de DIYables WebApps bibliotheek door DIYables
- Klik op de Install knop om de bibliotheek te installeren.
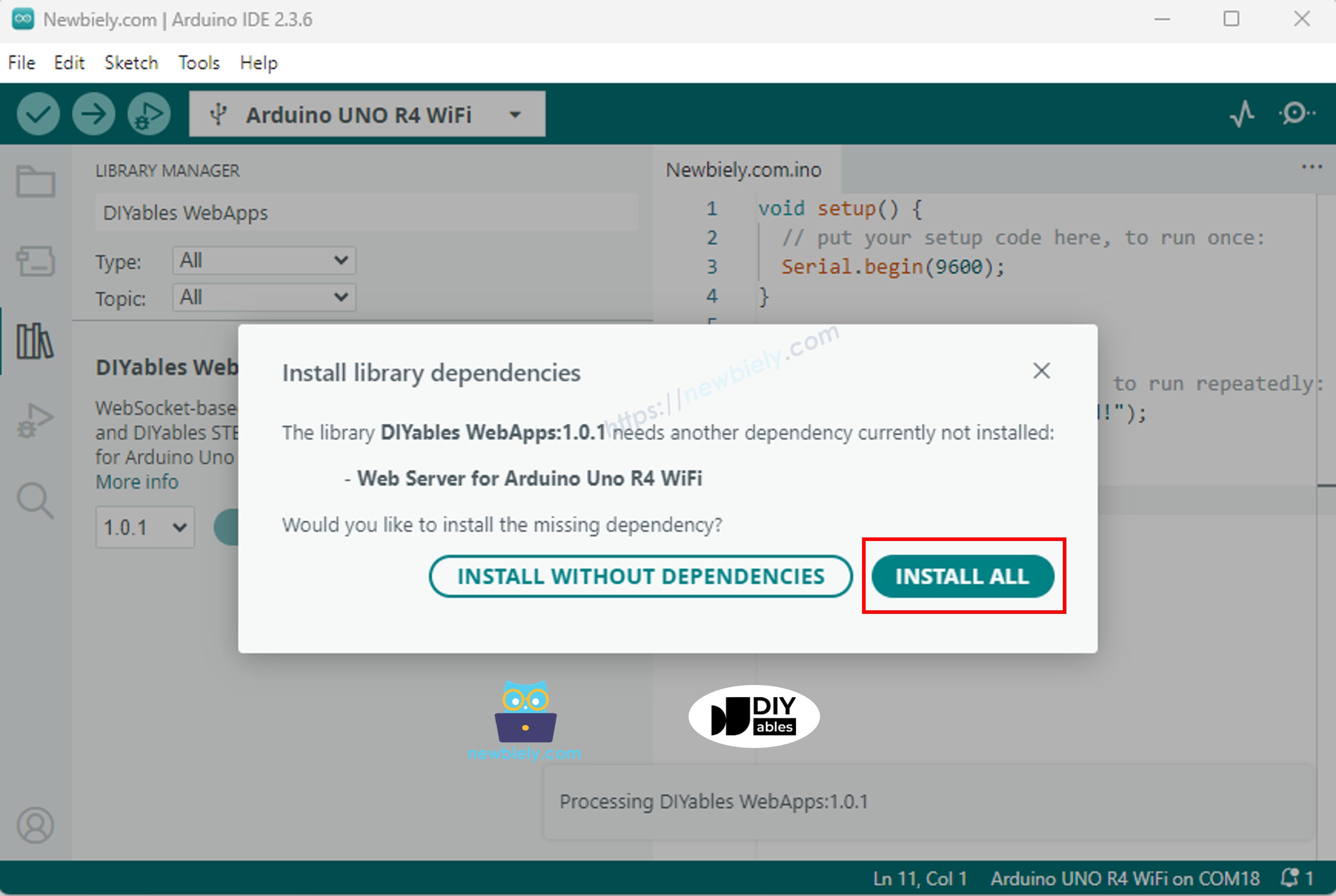
- U wordt gevraagd om enkele andere bibliotheek afhankelijkheden te installeren
- Klik op de Install All knop om alle bibliotheek afhankelijkheden te installeren.
- In Arduino IDE, ga naar File Examples DIYables WebApps WebJoystick voorbeeld, of kopieer de bovenstaande code en plak het in de editor van Arduino IDE
- Configureer WiFi gegevens in de code door deze regels bij te werken:
- Klik op de Upload knop in Arduino IDE om de code te uploaden naar Arduino UNO R4/DIYables STEM V4 IoT
- Open de Serial Monitor
- Bekijk het resultaat in Serial Monitor. Het ziet er uit zoals hieronder
- Als u niets ziet, herstart het Arduino board.
- Noteer het weergegeven IP-adres, en voer dit adres in in de adresbalk van een webbrowser op uw smartphone of PC.
- Voorbeeld: http://192.168.0.2
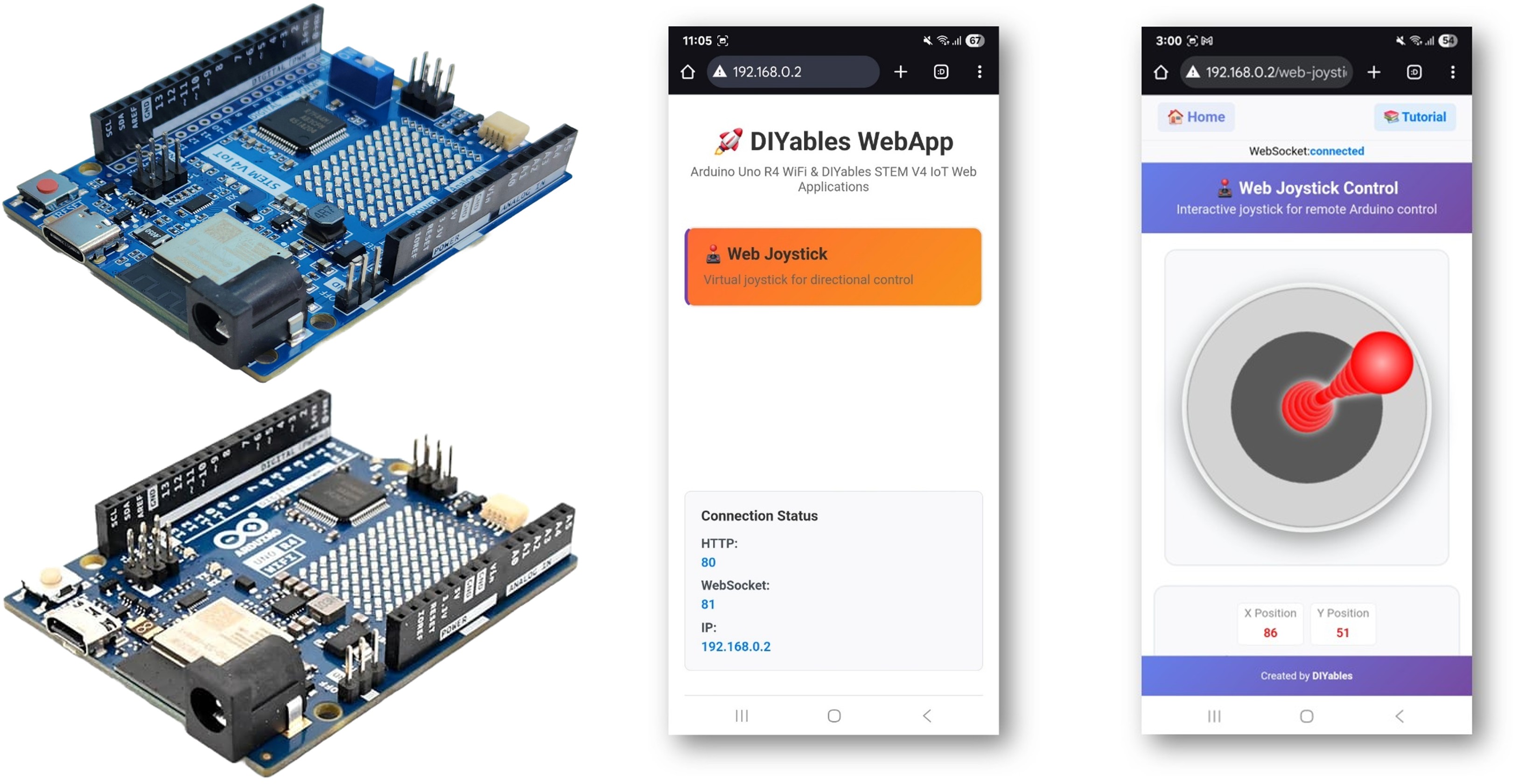
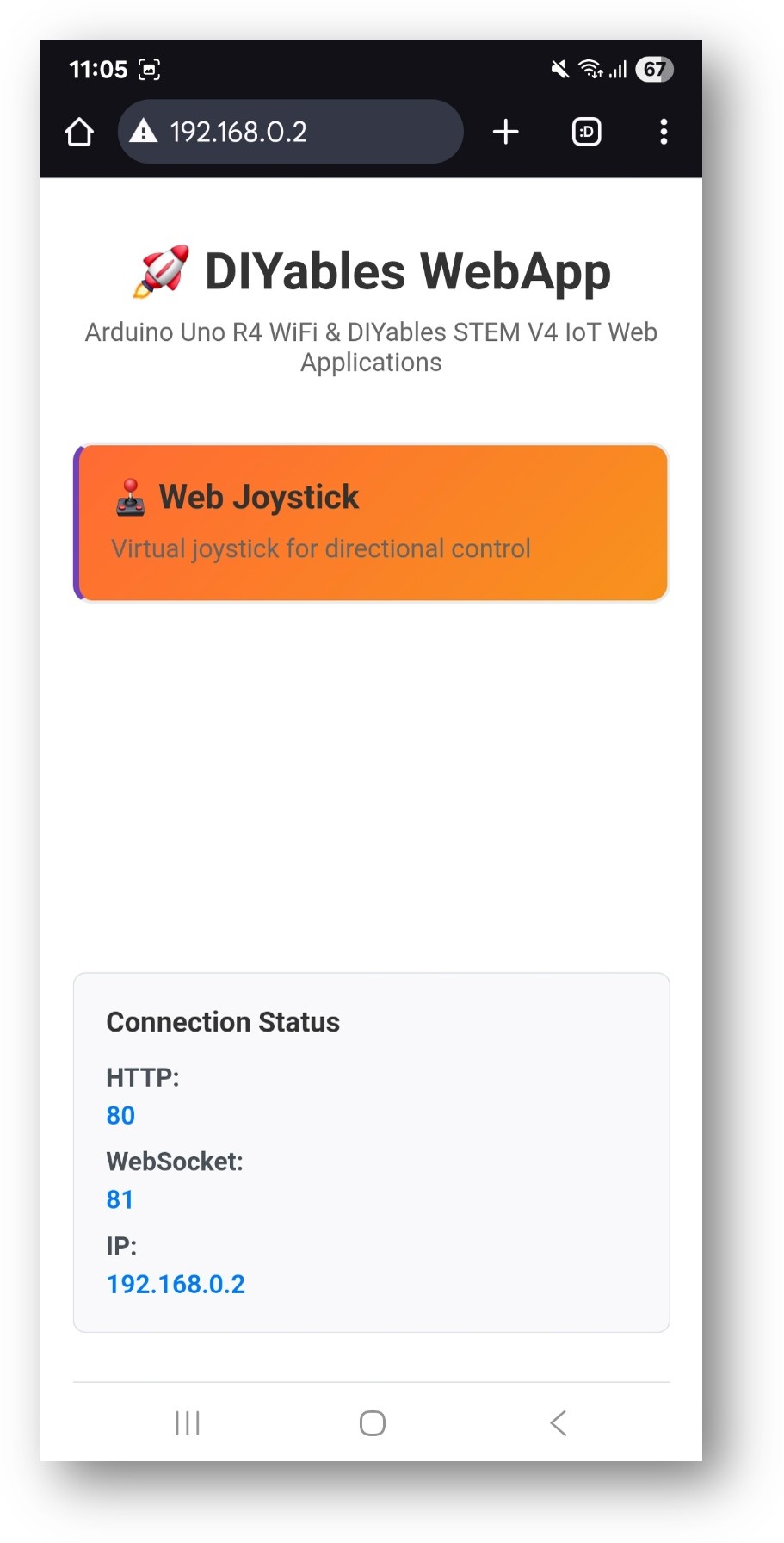
- U zult de startpagina zien zoals onderstaande afbeelding:
- Klik op de Web Joystick link, u zult de Web Joystick app's UI zien zoals hieronder:
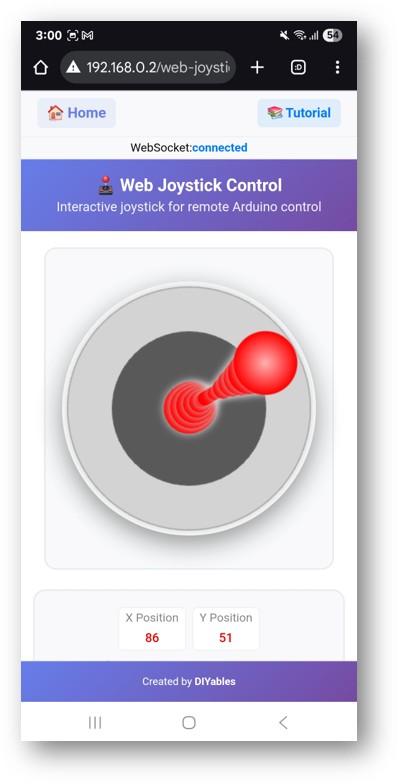
- Of u kunt ook direct naar de pagina gaan via het IP-adres gevolgd door /web-joystick. Bijvoorbeeld: http://192.168.0.2/web-joystick
- Probeer de virtuele joystick te besturen door te klikken en slepen in het joystick gebied en observeer de X/Y coördinaat waarden (-100 tot +100) in de Serial Monitor.
Creatieve Aanpassing - Pas de Code aan voor Uw Project
2. Configureer Joystick Instellingen
De joystick kan worden geconfigureerd met verschillende parameters:
Basis Configuratie
Geavanceerde Configuratie
Hoe de Joystick te Gebruiken
Web Interface Besturing
De joystick interface biedt:
- Joystick Pad: Cirkelvormig besturingsgebied voor touch/muis invoer
- Positie Indicator: Toont huidige joystick positie
- Coördinaten Weergave: Real-time X/Y waarden (-100 tot +100)
- Middenpunt: Visuele referentie voor neutrale positie
De Joystick Bedienen
Desktop (Muis Besturing)
- Klik en Sleep: Klik op joystick en sleep om te bewegen
- Loslaten: Joystick keert terug naar midden (als autoReturn=true)
- Klik Positie: Direct klikken om joystick positie in te stellen
Mobiel/Tablet (Touch Besturing)
- Touch en Sleep: Raak joystick aan en sleep vinger om te bewegen
- Multi-touch: Enkele vinger voor precieze besturing
- Loslaten: Automatische terugkeer naar midden (indien ingeschakeld)
Coördinaten Systeem
De joystick biedt coördinaten in een standaard Cartesiaans systeem:
- X-as: -100 (volledig links) tot +100 (volledig rechts)
- Y-as: -100 (volledig omlaag) tot +100 (volledig omhoog)
- Midden: X=0, Y=0 (neutrale positie)
- Hoeken: Diagonale posities bieden gecombineerde X/Y waarden
Programmeer Voorbeelden
Basis Joystick Handler
Motor Besturing Voorbeeld
Servo Besturing Voorbeeld
LED Positie Indicator
Geavanceerde Configuratie
Runtime Configuratie Wijzigingen
Dead Zone Implementatie
Snelheid Ramping
Hardware Integratie Voorbeelden
Robot Auto Besturing
Camera Gimbal Besturing
RGB LED Kleur Besturing
Probleemoplossing
Veelvoorkomende Problemen
1. Joystick reageert niet
- Controleer WebSocket verbindingsstatus in browser console
- Verifieer netwerkverbinding
- Ververs browser pagina
- Controleer Serial Monitor voor fouten
2. Schokkerige of inconsistente beweging
- Verhoog gevoeligheidswaarde om update frequentie te verminderen
- Implementeer dode zone filtering
- Voeg snelheid ramping toe voor vloeiende overgangen
- Controleer voor netwerklatentie problemen
3. Auto-return werkt niet
- Verifieer autoReturn instelling: webJoystickPage.setAutoReturn(true)
- Controleer browser compatibiliteit (sommige touch apparaten variëren)
- Test met verschillende invoermethoden (muis vs touch)
4. Waarden bereiken geen volledig bereik
- Controleer joystick kalibratie in web interface
- Verifieer coördinaat berekeningen in callback
- Test met verschillende browser/apparaat combinaties
Debug Tips
Voeg uitgebreide debugging toe:
Project Ideeën
Robotica Projecten
- Op afstand bestuurbare robot auto
- Robotarm besturing
- Drone vlucht besturing (basis bewegingen)
- Huisdier robot navigatie
Domotica
- Slimme gordijn besturing (open/dicht/positie)
- Camera pan/tilt besturing
- Licht helderheid en kleur besturing
- Ventilator snelheid en richting besturing
Educatieve Projecten
- Coördinaten systeem onderwijstool
- Motor besturing demonstraties
- Servo positionering experimenten
- Gaming controller interfaces
Kunst en Creatieve Projecten
- LED matrix patroon besturing
- Muziek visualisatie besturing
- Teken robot besturing
- Interactieve kunst installaties
Integratie met Andere Voorbeelden
Combineer met WebSlider
Gebruik joystick voor richting en sliders voor snelheid/intensiteit:
Combineer met WebDigitalPins
Gebruik joystick posities om digitale pin toestanden te activeren:
Volgende Stappen
Na het beheersen van het WebJoystick voorbeeld, probeer:
- WebSlider - Voor extra analoge besturing
- WebDigitalPins - Voor discrete aan/uit besturing
- WebMonitor - Voor debugging joystick waarden
- MultipleWebApps - Joystick combineren met andere besturingen
Ondersteuning
Voor extra hulp:
- Controleer de API Referentie documentatie
- Bezoek DIYables tutorials: https://newbiely.com/tutorials/arduino-uno-r4/arduino-uno-r4-diyables-webapps
- Arduino gemeenschap forums