Arduino UNO R4 WiFi Bluetooth Rotator Voorbeeld - Hoekbesturing via BLE Tutorial
Overzicht
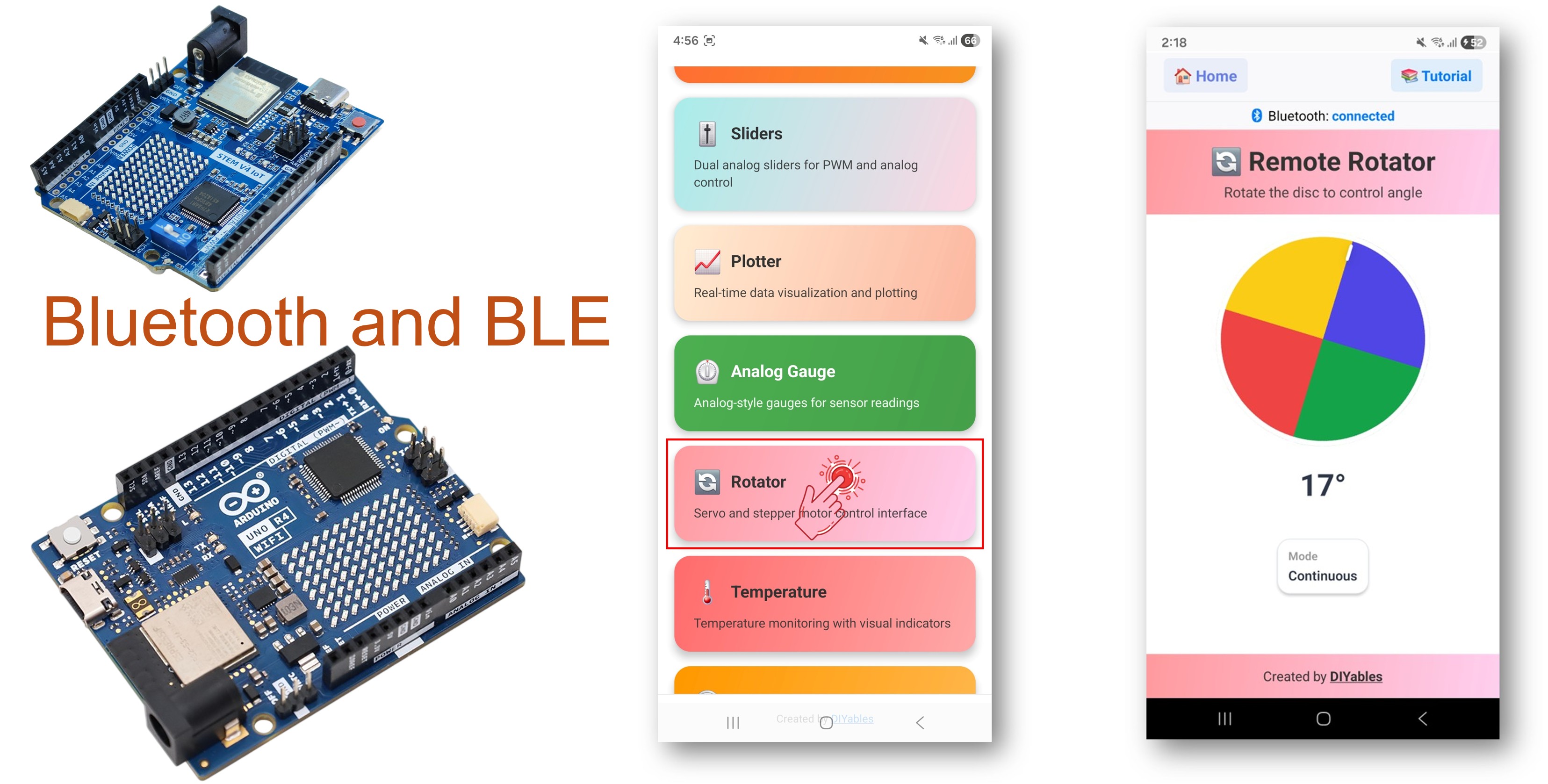
Het Bluetooth Rotator voorbeeld biedt hoekpositiebesturing via de DIYables Bluetooth STEM app. Ontworpen voor Arduino UNO R4 WiFi met gebruik van BLE (Bluetooth Low Energy) om rotatiehoeken en servomotoren draadloos te besturen vanaf uw smartphone. Ondersteunt beperkt-bereik en continue rotatiemodi. Perfect voor servobesturing, robotica, pan-tilt mechanismen en hoekpositionering.
Opmerking: De Arduino UNO R4 WiFi ondersteunt alleen BLE (Bluetooth Low Energy). Het ondersteunt geen Klassieke Bluetooth. De DIYables Bluetooth App ondersteunt zowel BLE als Klassieke Bluetooth op Android, en BLE op iOS. Omdat dit board BLE gebruikt, werkt de app op zowel Android als iOS.
Functies
- Beperkte Modus: Stel min/max hoekbereik in (bijv. 0° tot 180°)
- Continue Modus: Volledige 360° continue rotatie
- Real-Time Hoek: Ontvang hoekupdates terwijl gebruiker roteert
- Servo Integratie: Directe servomotorbesturing
- Initiële Hoek Synchronisatie: Verstuur huidige positie bij verbinding
- Werkt op Android & iOS: BLE wordt ondersteund op beide platformen
- Geen Koppelen Vereist: BLE maakt automatisch verbinding zonder handmatige koppeling
Benodigde Hardware
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V4 IoT Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Arduino UNO R4 WiFi Code
Snelle Stappen
Volg deze instructies stap voor stap:
- Als dit uw eerste keer is met de Arduino UNO R4 WiFi, raadpleeg dan de Arduino UNO R4 WiFi aan de slag gids.
- Verbind het Arduino UNO R4 WiFi board met uw computer via een USB-kabel.
- Start de Arduino IDE op uw computer.
- Selecteer Arduino UNO R4 WiFi board en de juiste COM-poort.
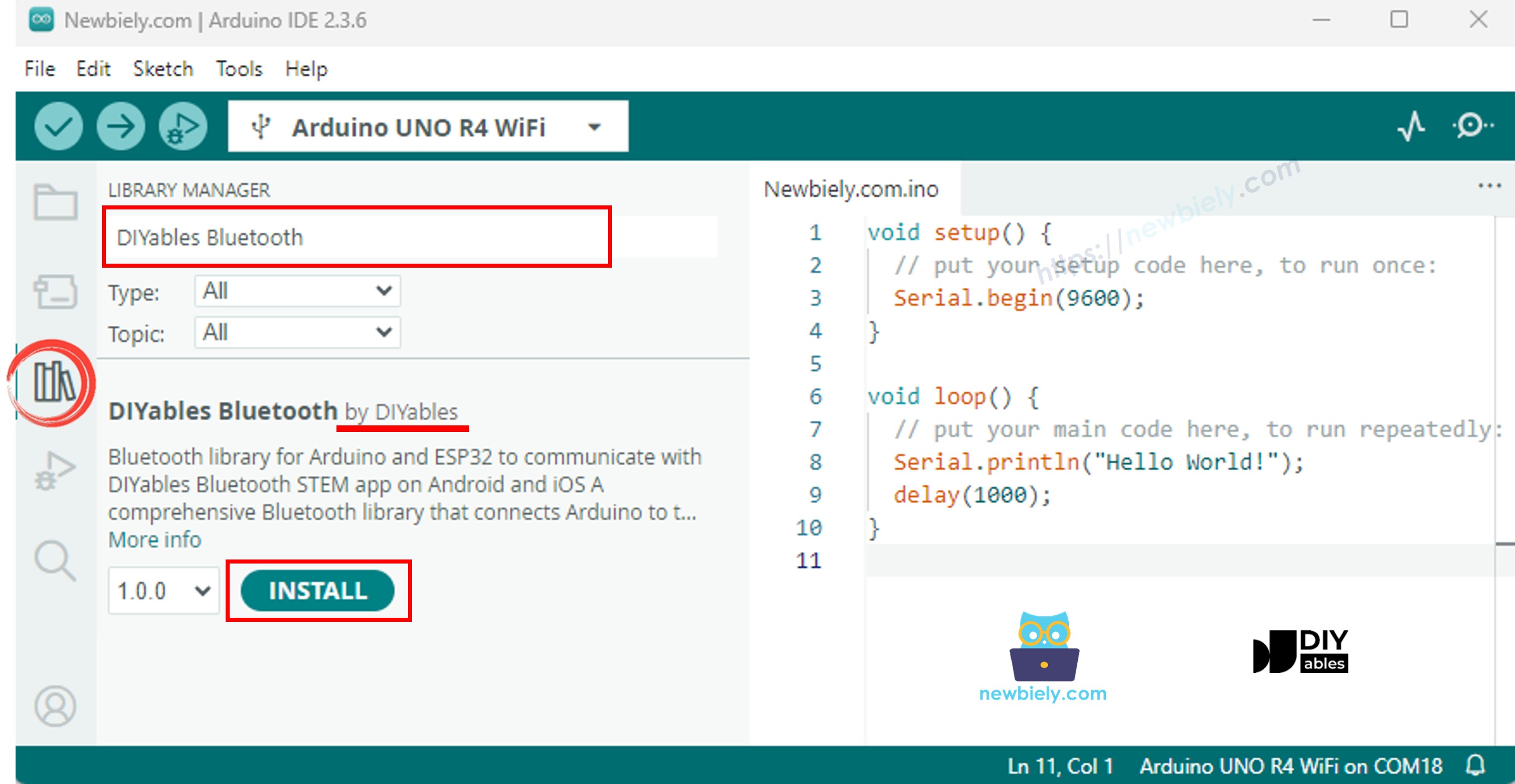
- Navigeer naar het Libraries pictogram in de linker balk van de Arduino IDE.
- Zoek naar "DIYables Bluetooth", vind vervolgens de DIYables Bluetooth bibliotheek door DIYables
- Klik op de Install knop om de bibliotheek te installeren.
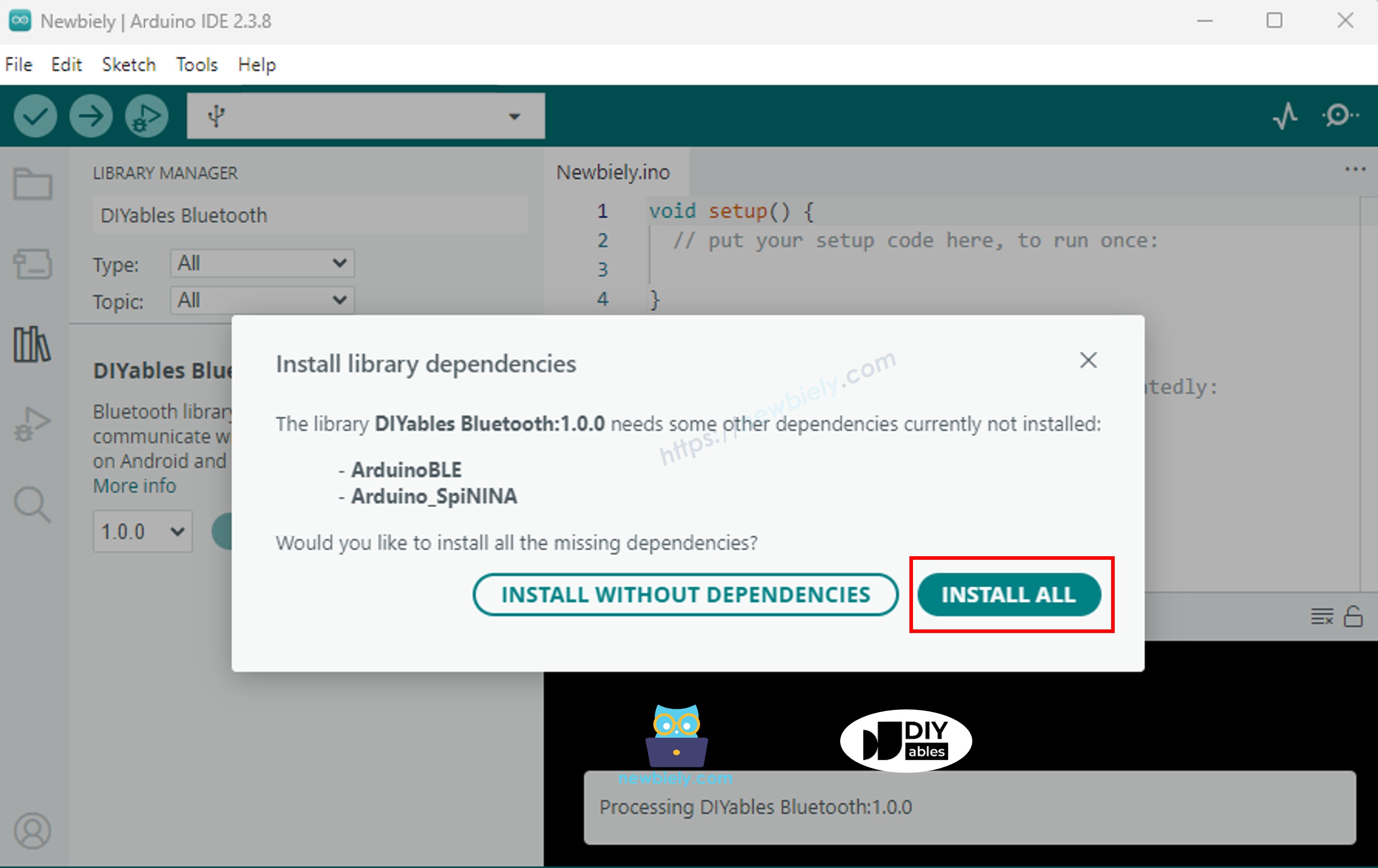
- U wordt gevraagd om enkele andere bibliotheekafhankelijkheden te installeren
- Klik op de Install All knop om alle bibliotheekafhankelijkheden te installeren.
BLE Code
- Ga in Arduino IDE naar File Examples DIYables Bluetooth ArduinoBLE_Rotator voorbeeld, of kopieer de bovenstaande code en plak deze in de editor van Arduino IDE
- Klik op de Upload knop in Arduino IDE om code te uploaden naar Arduino UNO R4 WiFi
- Open de Serial Monitor
- Bekijk het resultaat in Serial Monitor. Het ziet er als volgt uit:
Mobiele App
Opmerking: De DIYables Bluetooth App ondersteunt zowel BLE als Klassieke Bluetooth op Android, en BLE op iOS. Omdat de Arduino UNO R4 WiFi BLE gebruikt, werkt de app op zowel Android als iOS. Handmatige koppeling is niet nodig voor BLE — scan gewoon en maak verbinding.
- Open de DIYables Bluetooth App
- Bij het eerste gebruik vraagt de app om toestemmingen. Verleen de volgende:
- Nearby Devices toestemming (Android 12+) / Bluetooth toestemming (iOS) - vereist om Bluetooth-apparaten te scannen en verbinden
- Location toestemming (alleen Android 11 en lager) - vereist door oudere Android versies om BLE-apparaten te scannen
- Zorg ervoor dat Bluetooth is ingeschakeld op uw telefoon
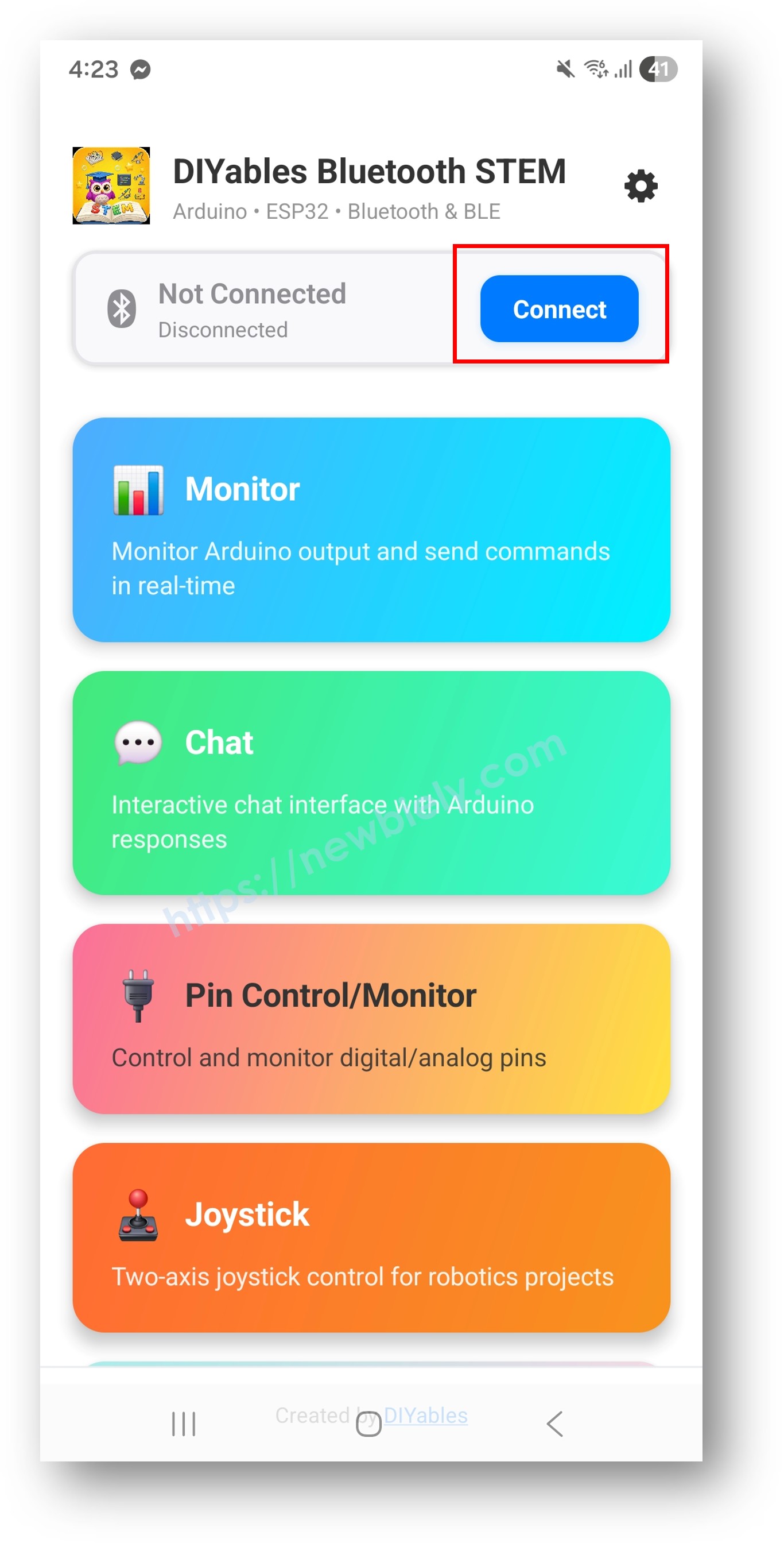
- Tik op het beginscherm op de Connect knop. De app zal scannen naar BLE-apparaten.
- Zoek en tik op "Arduino_Rotator" in de scanresultaten om verbinding te maken.
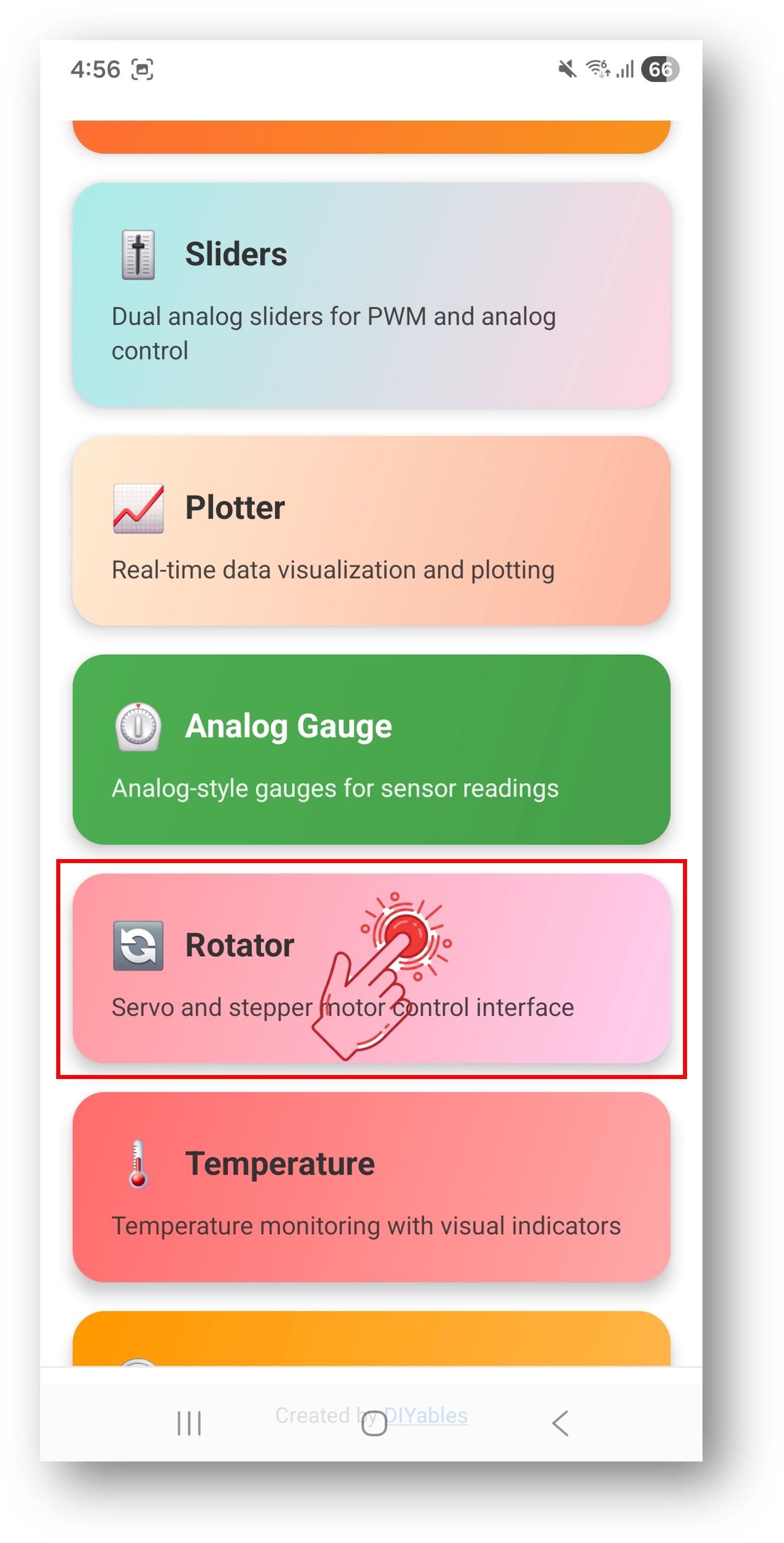
- Eenmaal verbonden gaat de app automatisch terug naar het beginscherm. Selecteer de Rotator app uit het app menu.
Opmerking: U kunt op het instellingenpictogram op het beginscherm tikken om apps op het beginscherm te verbergen/tonen. Voor meer details, zie de DIYables Bluetooth App Gebruikershandleiding.
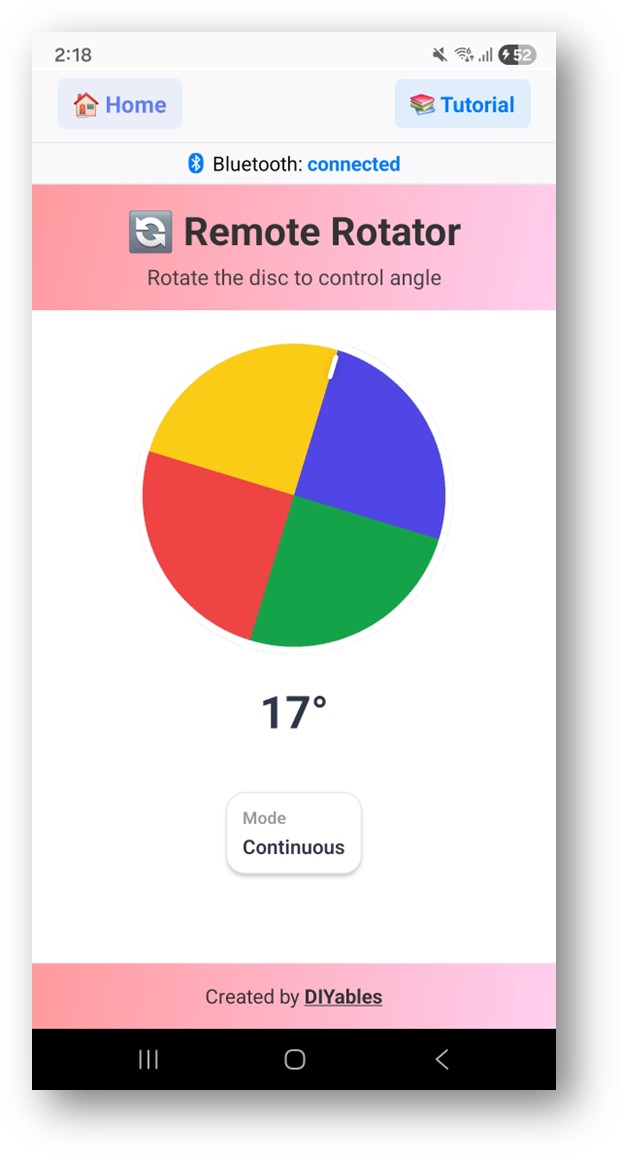
- U ziet een draaiknop die 0° tot 180° toont
- Draai de knop om hoekwaarden naar de Arduino te sturen
Kijk nu terug naar de Serial Monitor in Arduino IDE. U ziet:
Creatieve Aanpassing - Pas de Code aan voor Uw Project
Rotatiemodi
Behandel Hoekveranderingen
Verstuur Huidige Hoek
Programmeervoorbeelden
Servomotorbesturing
Pan-Tilt Camera Mount
Probleemoplossing
Veelvoorkomende Problemen
1. Kan het apparaat niet vinden in de app
- Zorg ervoor dat de Arduino UNO R4 WiFi is ingeschakeld en de sketch is geüpload
- Controleer of Bluetooth op uw telefoon is ingeschakeld
- Op Android 11 en lager, schakel ook Locatiediensten in
2. Servo reageert niet
- Controleer of de servo is aangesloten op de juiste pin
- Controleer of de servo bibliotheek is opgenomen en attach() is aangeroepen
- Zorg voor adequate voeding voor de servo
3. Hoekbereik lijkt verkeerd
- Controleer de min/max waarden in de constructor
- Zorg ervoor dat u ROTATOR_MODE_LIMITED gebruikt voor begrensd bereik
4. Draaiknop reset naar 0 bij herverbinding
- Verstuur de huidige hoek met sendAngle() wanneer het apparaat opnieuw verbindt
- De voorbeeldcode behandelt dit in de onRotatorAngle callback
5. Upload mislukt of board niet herkend
- Installeer het nieuwste Arduino UNO R4 board pakket via Board Manager
- Probeer een andere USB-kabel of poort
Projectideeën
- Servomotor controller
- Pan-tilt camera mount
- Robotarm gewrichtbesturing
- Draaiknop-gebaseerde thermostaat besturing
- Kompas/richting display
Volgende Stappen
Na het beheersen van het Bluetooth Rotator voorbeeld, probeer:
- Bluetooth Slider - Voor lineaire waardebesturing
- Bluetooth Joystick - Voor 2D positiebesturing
- Bluetooth Analog Gauge - Voor visuele feedback
- Meerdere Bluetooth Apps - Combineren van rotator met andere apps
Ondersteuning
Voor extra hulp:
- Bekijk de API Reference documentatie
- Bezoek DIYables tutorials
- Arduino community forums