Dit voorbeeld toont hoe u meerdere webapplicaties tegelijkertijd kunt gebruiken met de DIYables WebApps library. Het demonstreert de integratie van verschillende interactieve webinterfaces—zoals monitoring, besturing en communicatie—binnen een enkel project. Ontworpen voor de Arduino Uno R4 WiFi en DIYables STEM V4 IoT platform, is dit voorbeeld ideaal voor het leren combineren en beheren van meerdere web-gebaseerde functies tegelijkertijd, en biedt het een robuuste basis voor geavanceerde IoT projecten.
Volg deze instructies stap voor stap:
Verbind het Arduino Uno R4/DIYables STEM V4 IoT board met uw computer via een USB kabel.
Start de Arduino IDE op uw computer.
Selecteer het juiste Arduino Uno R4 board (bijv. Arduino Uno R4 WiFi) en COM poort.
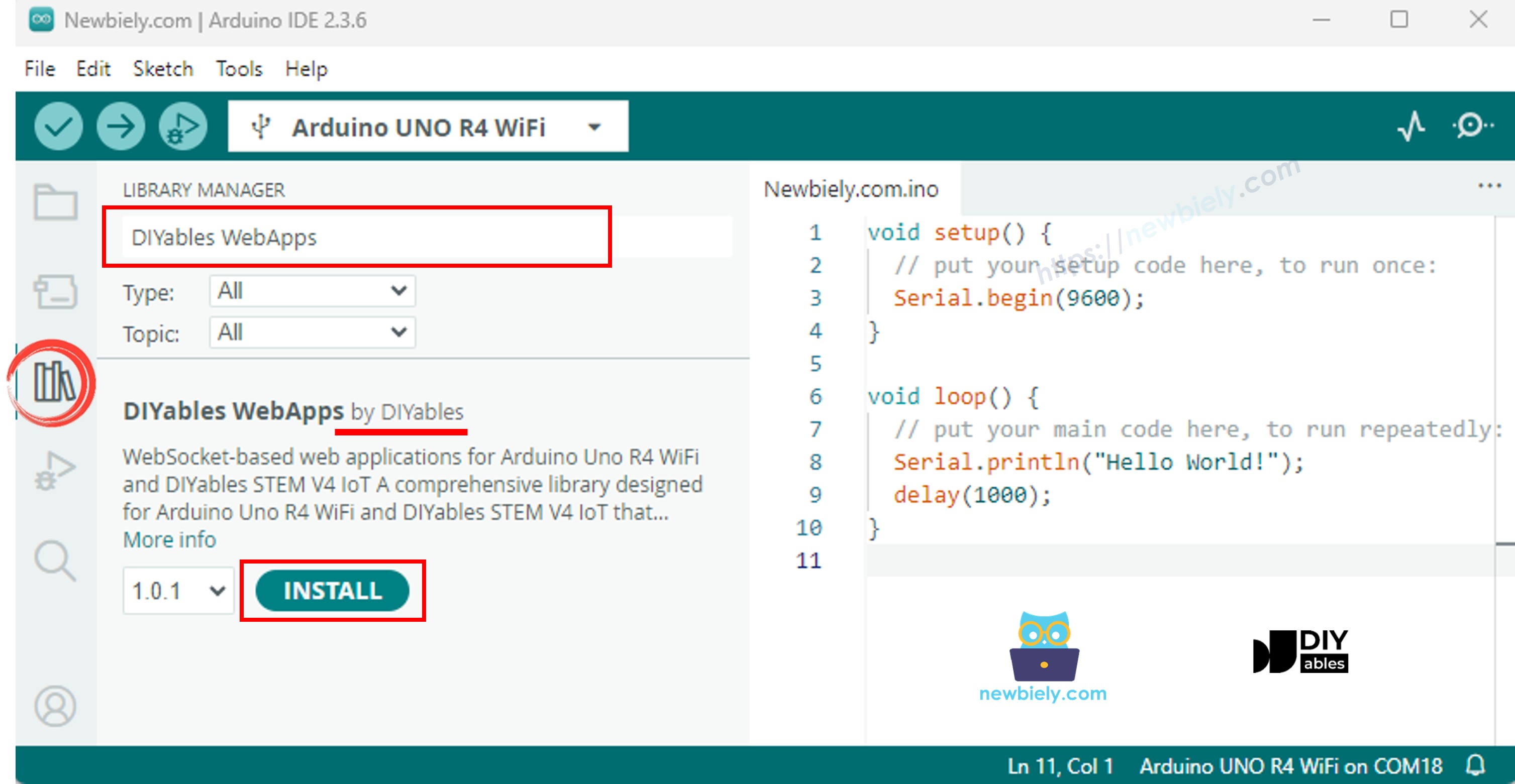
Navigeer naar het Libraries icoon in de linker balk van de Arduino IDE.
Zoek "DIYables WebApps", en vind vervolgens de DIYables WebApps library van DIYables
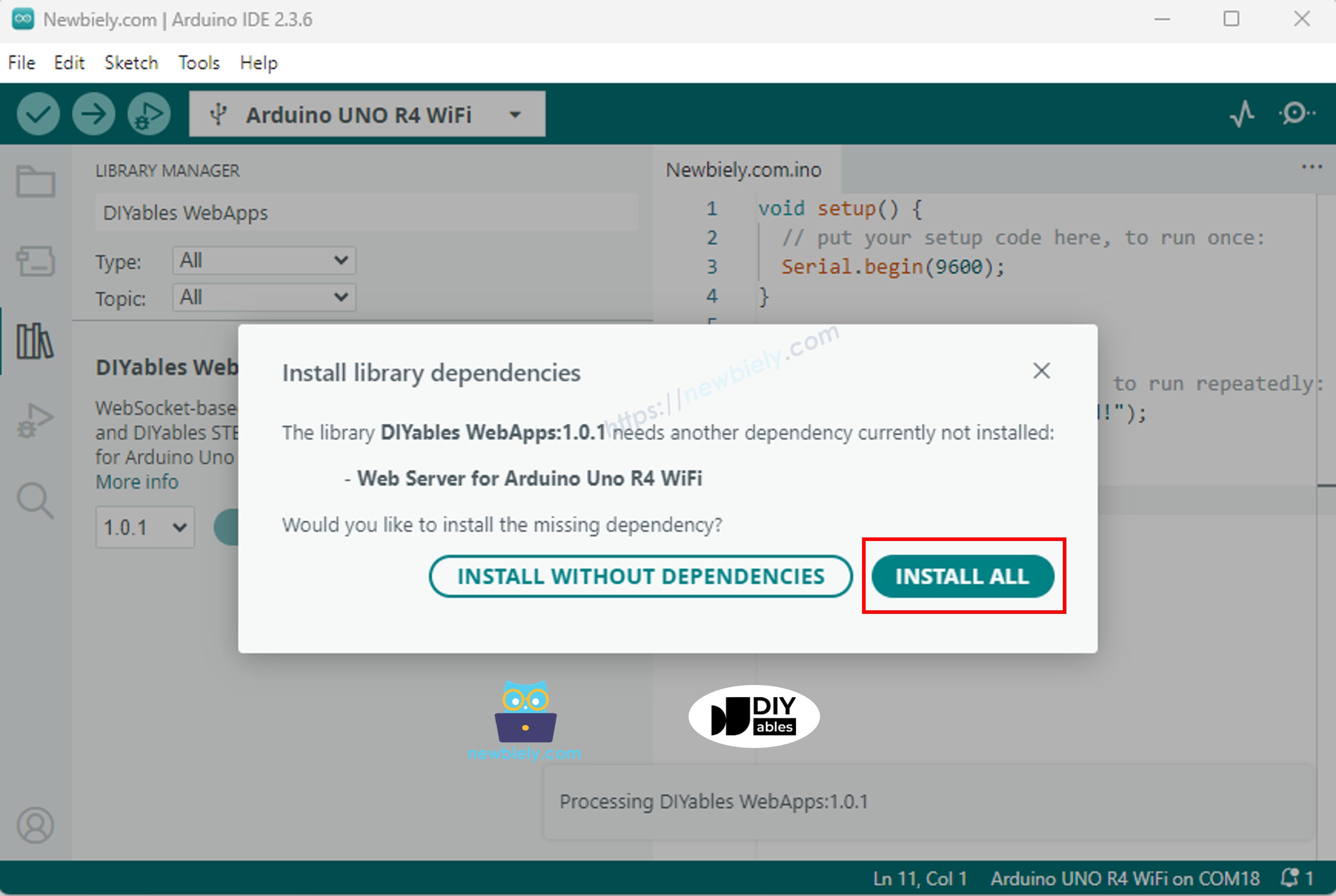
Klik op de Install knop om de library te installeren.
#include <DIYablesWebApps.h>
const char WIFI_SSID[] = "YOUR_WIFI_SSID";
const char WIFI_PASSWORD[] = "YOUR_WIFI_PASSWORD";
UnoR4ServerFactory factory;
DIYablesWebAppServer webAppsServer(factory, 80, 81);
DIYablesHomePage homePage;
DIYablesWebMonitorPage webMonitorPage;
DIYablesWebSliderPage webSliderPage;
DIYablesWebJoystickPage webJoystickPage(false, 5);
DIYablesWebRotatorPage webRotatorPage(ROTATOR_MODE_CONTINUOUS);
DIYablesWebAnalogGaugePage webAnalogGaugePage(0.0, 100.0, "%");
DIYablesWebTablePage webTablePage;
int currentSlider1 = 64;
int currentSlider2 = 128;
int currentJoystickX = 0;
int currentJoystickY = 0;
int currentRotatorAngle = 0;
float currentGaugeValue = 50.0;
void setup() {
Serial.begin(9600);
delay(1000);
Serial.println("DIYables WebApp - Multiple Apps Example");
webAppsServer.addApp(&homePage);
webAppsServer.addApp(&webMonitorPage);
webAppsServer.addApp(&webSliderPage);
webAppsServer.addApp(&webJoystickPage);
webAppsServer.addApp(&webRotatorPage);
webAppsServer.addApp(&webAnalogGaugePage);
webAppsServer.addApp(&webTablePage);
webAppsServer.setNotFoundPage(DIYablesNotFoundPage());
webTablePage.addRow("Arduino Status");
webTablePage.addRow("WiFi Connected");
webTablePage.addRow("Uptime");
webTablePage.addRow("Slider 1");
webTablePage.addRow("Slider 2");
webTablePage.addRow("Joystick X");
webTablePage.addRow("Joystick Y");
webTablePage.addRow("Rotator Angle");
webTablePage.addRow("Gauge Value");
if (!webAppsServer.begin(WIFI_SSID, WIFI_PASSWORD)) {
while (1) {
Serial.println("Failed to start WebApp server!");
delay(1000);
}
}
setupCallbacks();
}
void setupCallbacks() {
webMonitorPage.onWebMonitorMessage([](const String& message) {
Serial.println("Web Monitor: " + message);
webMonitorPage.sendToWebMonitor("Arduino received: " + message);
});
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
currentSlider1 = slider1;
currentSlider2 = slider2;
Serial.print("Slider 1: ");
Serial.print(slider1);
Serial.print(", Slider 2: ");
Serial.println(slider2);
webTablePage.sendValueUpdate("Slider 1", String(slider1));
webTablePage.sendValueUpdate("Slider 2", String(slider2));
currentGaugeValue = map(slider1, 0, 255, 0, 100);
webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);
char gaugeStr[16];
snprintf(gaugeStr, sizeof(gaugeStr), "%.1f%%", currentGaugeValue);
webTablePage.sendValueUpdate("Gauge Value", String(gaugeStr));
});
webSliderPage.onSliderValueToWeb([]() {
webSliderPage.sendToWebSlider(currentSlider1, currentSlider2);
});
webJoystickPage.onJoystickValueFromWeb([](int x, int y) {
currentJoystickX = x;
currentJoystickY = y;
Serial.print("Joystick - X: ");
Serial.print(x);
Serial.print(", Y: ");
Serial.println(y);
Serial.print(x);
Serial.print(", Y: ");
Serial.println(y);
webTablePage.sendValueUpdate("Joystick X", String(x));
webTablePage.sendValueUpdate("Joystick Y", String(y));
}
});
webJoystickPage.onJoystickValueToWeb([]() {
webJoystickPage.sendToWebJoystick(currentJoystickX, currentJoystickY);
});
webRotatorPage.onRotatorAngleFromWeb([](float angle) {
currentRotatorAngle = (int)angle;
Serial.println("Rotator angle: " + String(angle) + "°");
webTablePage.sendValueUpdate("Rotator Angle", String(angle, 0) + "°");
});
webAnalogGaugePage.onGaugeValueRequest([]() {
webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);
});
webTablePage.onTableValueRequest([]() {
webTablePage.sendValueUpdate("Arduino Status", "Running");
webTablePage.sendValueUpdate("WiFi Connected", "Yes");
webTablePage.sendValueUpdate("Uptime", "0 seconds");
webTablePage.sendValueUpdate("Slider 1", String(currentSlider1));
webTablePage.sendValueUpdate("Slider 2", String(currentSlider2));
webTablePage.sendValueUpdate("Joystick X", String(currentJoystickX));
webTablePage.sendValueUpdate("Joystick Y", String(currentJoystickY));
webTablePage.sendValueUpdate("Rotator Angle", String(currentRotatorAngle) + "°");
webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%");
});
}
void loop() {
webAppsServer.loop();
static unsigned long lastUptimeUpdate = 0;
if (millis() - lastUptimeUpdate > 5000) {
lastUptimeUpdate = millis();
unsigned long uptimeSeconds = millis() / 1000;
String uptimeStr = String(uptimeSeconds) + " seconds";
if (uptimeSeconds >= 60) {
uptimeStr = String(uptimeSeconds / 60) + "m " + String(uptimeSeconds % 60) + "s";
}
webTablePage.sendValueUpdate("Uptime", uptimeStr);
}
static unsigned long lastSensorUpdate = 0;
if (millis() - lastSensorUpdate > 3000) {
lastSensorUpdate = millis();
float sensorValue = 50.0 + 30.0 * sin(millis() / 10000.0);
currentGaugeValue = sensorValue;
webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);
webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%");
}
delay(10);
}
const char WIFI_SSID[] = "YOUR_WIFI_NETWORK";
const char WIFI_PASSWORD[] = "YOUR_WIFI_PASSWORD";
DIYables WebApp - Multiple Apps Example
INFO: Added app /
INFO: Added app /web-monitor
INFO: Added app /web-slider
INFO: Added app /web-joystick
INFO: Added app /web-rotator
INFO: Added app /web-gauge
INFO: Added app /web-table
DIYables WebApp Library
Platform: Arduino Uno R4 WiFi
Network connected!
IP address: 192.168.0.2
HTTP server started on port 80
Configuring WebSocket server callbacks...
WebSocket server started on port 81
WebSocket URL: ws://192.168.0.2:81
WebSocket server started on port 81
==========================================
DIYables WebApp Ready!
==========================================
📱 Web Interface: http://192.168.0.2
🔗 WebSocket: ws://192.168.0.2:81
📋 Available Applications:
🏠 Home Page: http://192.168.0.2/
📊 Web Monitor: http://192.168.0.2/web-monitor
🎚️ Web Slider: http://192.168.0.2/web-slider
🕹️ Web Joystick: http://192.168.0.2/web-joystick
🔄 Web Rotator: http://192.168.0.2/web-rotator
⏲️ Web Analog Gauge: http://192.168.0.2/web-gauge
📊 Web Table: http://192.168.0.2/web-table
==========================================
Als u niets ziet, herstart dan het Arduino board.
Noteer het weergegeven IP-adres en voer dit adres in de adresbalk van een webbrowser op uw smartphone of PC in.
Voorbeeld: http://192.168.0.2
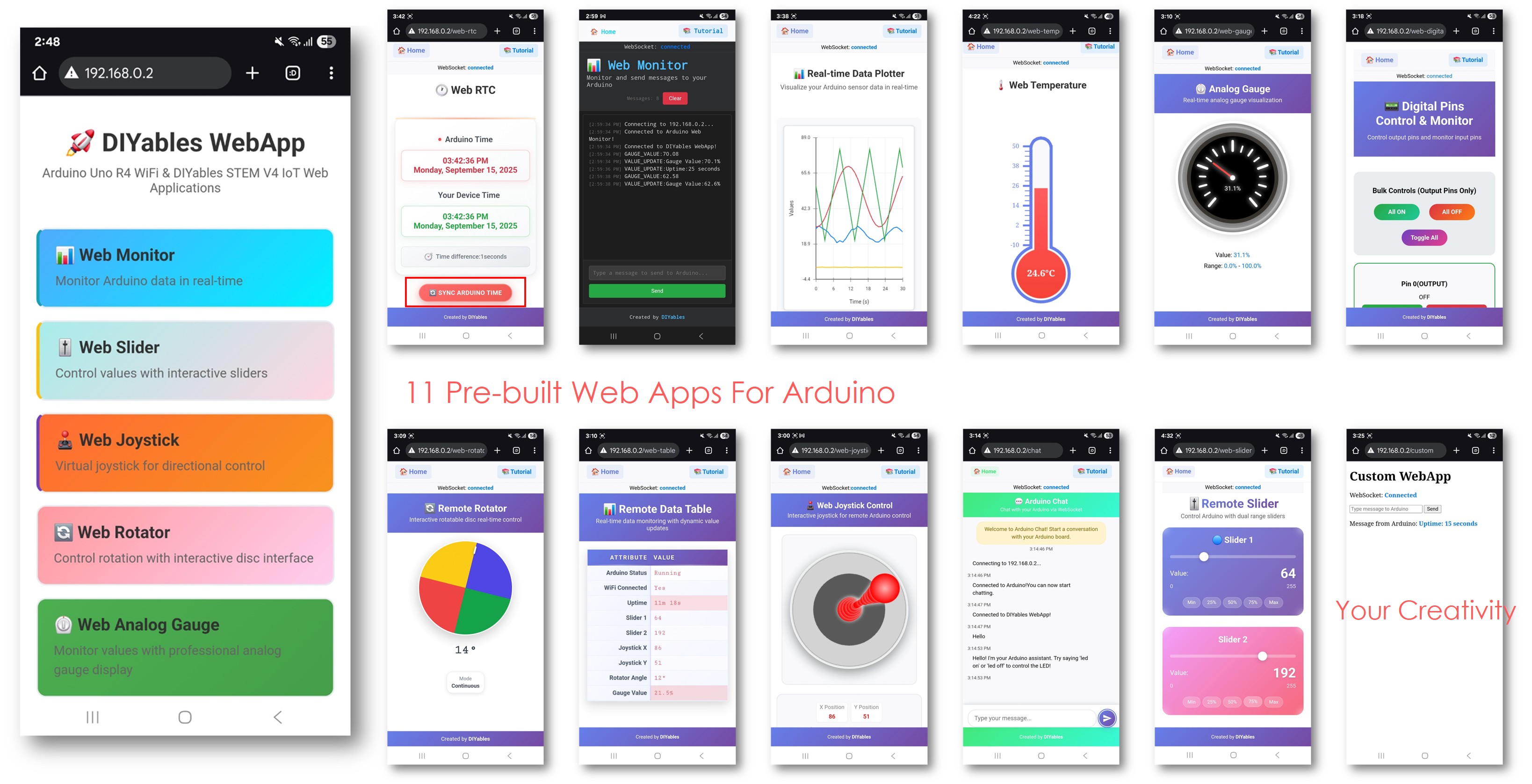
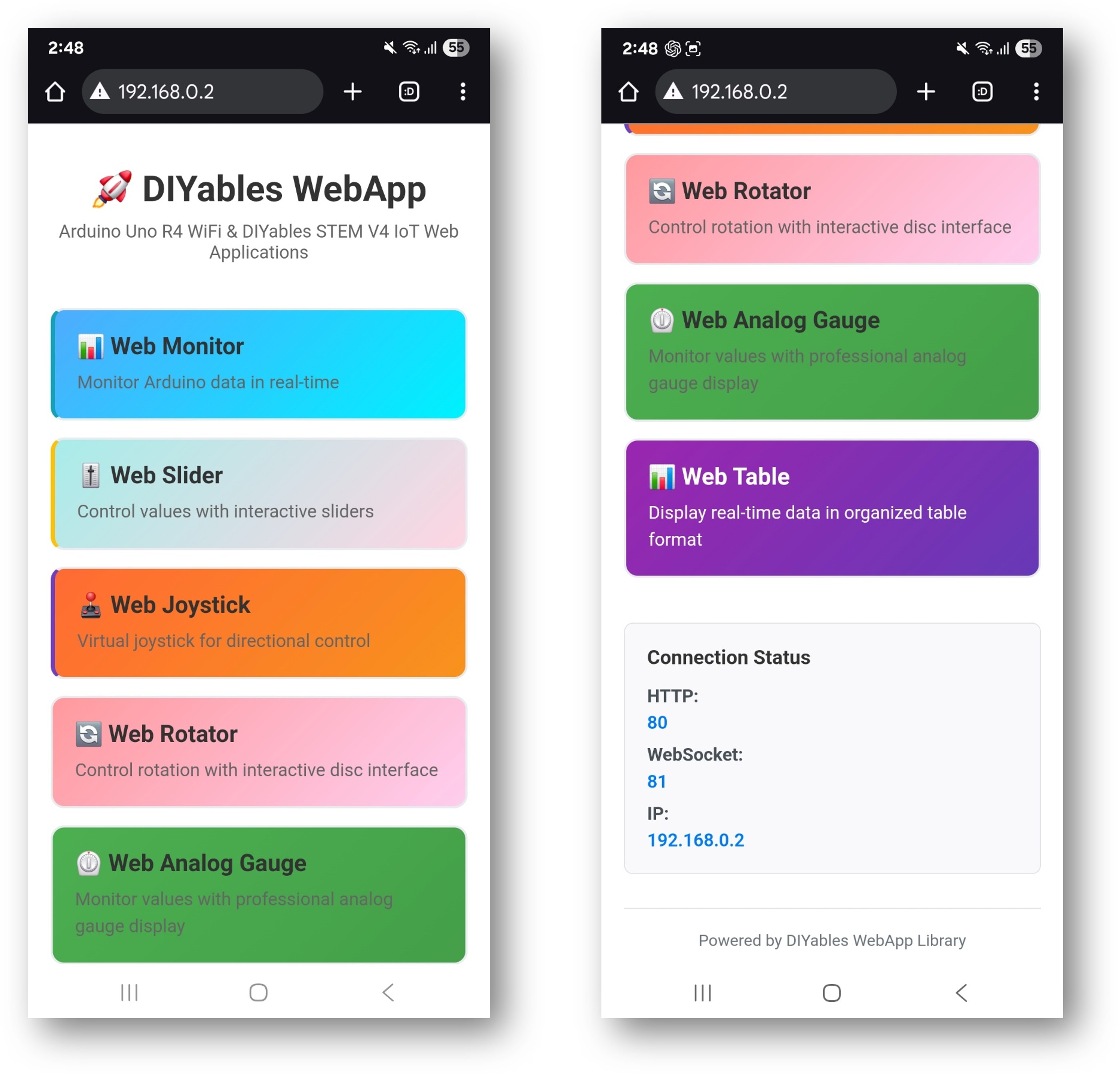
U zult de home pagina zien met alle webapplicaties zoals onderstaande afbeelding:
Klik op elke webapplicatie link (Chat, Web Monitor, Web Digital Pins, Web Slider, Web Joystick, etc.), u zult de bijbehorende web app's UI zien.
Of u kunt ook elke pagina direct bereiken via het IP-adres gevolgd door het app pad. Bijvoorbeeld: http://192.168.0.2/chat, http://192.168.0.2/web-monitor, etc.
Verken alle webapplicaties: probeer te chatten met Arduino, monitor seriële uitvoer, bestuur digitale pins, pas sliders aan, en gebruik de virtuele joystick om de volledige mogelijkheden van de geïntegreerde web interface te ervaren.
De home pagina dient als uw controlecentrum met links naar alle applicaties:
Web Monitor: /webmonitor - Seriële communicatie interface
Chat: /chat - Interactieve messaging met Arduino
Digital Pins: /digital-pins - Pin besturing en monitoring
Web Slider: /webslider - Dubbele analoge besturing sliders
Web Joystick: /webjoystick - 2D positiebesturing interface
Benader elke interface direct:
http://[ARDUINO_IP]/ # Home pagina
http://[ARDUINO_IP]/webmonitor # Serial monitor interface
http://[ARDUINO_IP]/chat # Chat interface
http://[ARDUINO_IP]/digital-pins # Pin besturing
http://[ARDUINO_IP]/webslider # Slider besturing
http://[ARDUINO_IP]/webjoystick # Joystick besturing
Dit uitgebreide voorbeeld biedt een basis voor uw creatieve projecten. Wijzig en pas de onderstaande configuraties aan om geweldige IoT applicaties te bouwen die passen bij uw unieke visie.
Het voorbeeld pre-configureert specifieke pins voor verschillende doeleinden:
webDigitalPinsPage.enablePin(2, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(3, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(4, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(13, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(8, WEB_PIN_INPUT);
webDigitalPinsPage.enablePin(9, WEB_PIN_INPUT);
DIYablesWebJoystickPage webJoystickPage(false, 5);
Het voorbeeld houdt gesynchroniseerde status bij over alle interfaces:
int pinStates[16] = { LOW };
int currentSlider1 = 64;
int currentSlider2 = 128;
int currentJoystickX = 0;
int currentJoystickY = 0;
De chat interface bevat verschillende vooraf geprogrammeerde commando's:
hello - Vriendelijke begroeting respons
time - Toont Arduino uptime in seconden
status - Rapporteert Arduino status en LED staat
help - Lijst beschikbare commando's
User: hello
Arduino: Hello! I'm your Arduino. How can I help you?
User: led on
Arduino: Built-in LED is now ON!
User: time
Arduino: I've been running for 1245 seconds.
User: status
Arduino: Status: Running smoothly! LED is ON
#include <Servo.h>
const int MOTOR_LEFT_PWM = 9;
const int MOTOR_RIGHT_PWM = 10;
const int SERVO_PAN = 11;
const int SERVO_TILT = 12;
const int LED_STRIP_PIN = 6;
Servo panServo, tiltServo;
void setup() {
panServo.attach(SERVO_PAN);
tiltServo.attach(SERVO_TILT);
pinMode(MOTOR_LEFT_PWM, OUTPUT);
pinMode(MOTOR_RIGHT_PWM, OUTPUT);
setupRobotCallbacks();
}
void setupRobotCallbacks() {
webJoystickPage.onJoystickValueFromWeb([](int x, int y) {
int leftSpeed = y + (x / 2);
int rightSpeed = y - (x / 2);
leftSpeed = constrain(leftSpeed, -100, 100);
rightSpeed = constrain(rightSpeed, -100, 100);
leftSpeed = map(leftSpeed, -100, 100, -currentSlider1, currentSlider1);
rightSpeed = map(rightSpeed, -100, 100, -currentSlider1, currentSlider1);
analogWrite(MOTOR_LEFT_PWM, abs(leftSpeed));
analogWrite(MOTOR_RIGHT_PWM, abs(rightSpeed));
Serial.println("Robot - Links: " + String(leftSpeed) + ", Rechts: " + String(rightSpeed));
});
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
int panAngle = map(currentJoystickX, -100, 100, 0, 180);
int tiltAngle = map(slider2, 0, 255, 0, 180);
panServo.write(panAngle);
tiltServo.write(tiltAngle);
Serial.println("Camera - Pan: " + String(panAngle) + "°, Tilt: " + String(tiltAngle) + "°");
});
webDigitalPinsPage.onPinWrite([](int pin, int state) {
switch (pin) {
case 2:
digitalWrite(pin, state);
Serial.println("Koplampen " + String(state ? "AAN" : "UIT"));
break;
case 3:
if (state) {
digitalWrite(pin, HIGH);
delay(200);
digitalWrite(pin, LOW);
}
break;
case 4:
if (state) {
analogWrite(MOTOR_LEFT_PWM, 0);
analogWrite(MOTOR_RIGHT_PWM, 0);
Serial.println("NOODSTOP GEACTIVEERD");
}
break;
}
});
chatPage.onChatMessage([](const String& message) {
String msg = message;
msg.toLowerCase();
if (msg.indexOf("stop") >= 0) {
analogWrite(MOTOR_LEFT_PWM, 0);
analogWrite(MOTOR_RIGHT_PWM, 0);
chatPage.sendToChat("Robot gestopt!");
return;
}
if (msg.indexOf("center camera") >= 0) {
panServo.write(90);
tiltServo.write(90);
chatPage.sendToChat("Camera gecentreerd!");
return;
}
if (msg.indexOf("speed") >= 0) {
String response = "Huidige max snelheid: " + String(map(currentSlider1, 0, 255, 0, 100)) + "%";
chatPage.sendToChat(response);
return;
}
chatPage.sendToChat("Robot commando's: stop, center camera, speed");
});
}
const int LIVING_ROOM_LIGHTS = 2;
const int BEDROOM_LIGHTS = 3;
const int KITCHEN_LIGHTS = 4;
const int FAN_CONTROL = 9;
const int AC_CONTROL = 10;
const int MOTION_SENSOR = 8;
const int DOOR_SENSOR = 9;
void setupHomeAutomation() {
pinMode(LIVING_ROOM_LIGHTS, OUTPUT);
pinMode(BEDROOM_LIGHTS, OUTPUT);
pinMode(KITCHEN_LIGHTS, OUTPUT);
pinMode(FAN_CONTROL, OUTPUT);
pinMode(AC_CONTROL, OUTPUT);
pinMode(MOTION_SENSOR, INPUT);
pinMode(DOOR_SENSOR, INPUT_PULLUP);
webDigitalPinsPage.onPinWrite([](int pin, int state) {
digitalWrite(pin, state);
String room;
switch (pin) {
case 2: room = "Woonkamer"; break;
case 3: room = "Slaapkamer"; break;
case 4: room = "Keuken"; break;
default: room = "Pin " + String(pin); break;
}
Serial.println(room + " verlichting " + String(state ? "AAN" : "UIT"));
String message = room + " verlichting " + String(state ? "aangezet" : "uitgezet");
chatPage.sendToChat(message);
});
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
analogWrite(FAN_CONTROL, slider1);
analogWrite(AC_CONTROL, slider2);
Serial.println("Ventilator: " + String(map(slider1, 0, 255, 0, 100)) + "%, " +
"AC: " + String(map(slider2, 0, 255, 0, 100)) + "%");
});
chatPage.onChatMessage([](const String& message) {
String msg = message;
msg.toLowerCase();
if (msg.indexOf("alle lichten aan") >= 0) {
digitalWrite(LIVING_ROOM_LIGHTS, HIGH);
digitalWrite(BEDROOM_LIGHTS, HIGH);
digitalWrite(KITCHEN_LIGHTS, HIGH);
chatPage.sendToChat("Alle lichten aangezet!");
return;
}
if (msg.indexOf("alle lichten uit") >= 0) {
digitalWrite(LIVING_ROOM_LIGHTS, LOW);
digitalWrite(BEDROOM_LIGHTS, LOW);
digitalWrite(KITCHEN_LIGHTS, LOW);
chatPage.sendToChat("Alle lichten uitgezet!");
return;
}
if (msg.indexOf("temperatuur") >= 0) {
String response = "Ventilator: " + String(map(currentSlider1, 0, 255, 0, 100)) + "%, " +
"AC: " + String(map(currentSlider2, 0, 255, 0, 100)) + "%";
chatPage.sendToChat(response);
return;
}
if (msg.indexOf("beveiliging") >= 0) {
bool motion = digitalRead(MOTION_SENSOR);
bool door = digitalRead(DOOR_SENSOR);
String status = "Beweging: " + String(motion ? "GEDETECTEERD" : "VRIJ") +
", Deur: " + String(door ? "GESLOTEN" : "OPEN");
chatPage.sendToChat(status);
return;
}
chatPage.sendToChat("Huis commando's: alle lichten aan/uit, temperatuur, beveiliging");
});
}
void loop() {
server.loop();
static bool lastMotion = false;
static bool lastDoor = false;
bool currentMotion = digitalRead(MOTION_SENSOR);
bool currentDoor = digitalRead(DOOR_SENSOR);
if (currentMotion != lastMotion) {
if (currentMotion) {
chatPage.sendToChat("🚨 BEWEGING GEDETECTEERD!");
webMonitorPage.sendToWebMonitor("Beveiligings Waarschuwing: Beweging gedetecteerd");
}
lastMotion = currentMotion;
}
if (currentDoor != lastDoor) {
String status = currentDoor ? "GESLOTEN" : "GEOPEND";
chatPage.sendToChat("🚪 Deur " + status);
webMonitorPage.sendToWebMonitor("Beveiliging: Deur " + status);
lastDoor = currentDoor;
}
delay(10);
}
const int HEATING_ELEMENT = 9;
const int COOLING_FAN = 10;
const int STIRRER_MOTOR = 11;
const int TEMP_SENSOR_PIN = A0;
const int PH_SENSOR_PIN = A1;
void setupScienceExperiment() {
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
int targetTemp = map(slider1, 0, 255, 20, 80);
analogWrite(STIRRER_MOTOR, slider2);
int currentTemp = readTemperature();
if (currentTemp < targetTemp) {
analogWrite(HEATING_ELEMENT, 200);
analogWrite(COOLING_FAN, 0);
} else if (currentTemp > targetTemp + 2) {
analogWrite(HEATING_ELEMENT, 0);
analogWrite(COOLING_FAN, 255);
} else {
analogWrite(HEATING_ELEMENT, 0);
analogWrite(COOLING_FAN, 0);
}
Serial.println("Doel: " + String(targetTemp) + "°C, Huidige: " + String(currentTemp) + "°C");
});
chatPage.onChatMessage([](const String& message) {
String msg = message;
msg.toLowerCase();
if (msg.indexOf("data") >= 0) {
int temp = readTemperature();
float ph = readPH();
String data = "Temperatuur: " + String(temp) + "°C, pH: " + String(ph, 2);
chatPage.sendToChat(data);
return;
}
if (msg.indexOf("start") >= 0) {
chatPage.sendToChat("🔬 Experiment gestart! Monitort condities...");
return;
}
if (msg.indexOf("stop") >= 0) {
analogWrite(HEATING_ELEMENT, 0);
analogWrite(COOLING_FAN, 0);
analogWrite(STIRRER_MOTOR, 0);
chatPage.sendToChat("⚠️ Experiment gestopt - alle systemen UIT");
return;
}
chatPage.sendToChat("Wetenschap commando's: data, start, stop");
});
webMonitorPage.onWebMonitorMessage([](const String& message) {
if (message == "log") {
int temp = readTemperature();
float ph = readPH();
String logEntry = String(millis()) + "," + String(temp) + "," + String(ph, 2);
webMonitorPage.sendToWebMonitor(logEntry);
}
});
}
int readTemperature() {
int sensorValue = analogRead(TEMP_SENSOR_PIN);
return map(sensorValue, 0, 1023, 0, 100);
}
float readPH() {
int sensorValue = analogRead(PH_SENSOR_PIN);
return map(sensorValue, 0, 1023, 0, 14) / 10.0;
}
void synchronizeAllStates() {
webSliderPage.sendToWebSlider(currentSlider1, currentSlider2);
webJoystickPage.sendToWebJoystick(currentJoystickX, currentJoystickY);
for (int pin = 0; pin <= 13; pin++) {
if (webDigitalPinsPage.isPinEnabled(pin)) {
webDigitalPinsPage.updatePinState(pin, pinStates[pin]);
}
}
Serial.println("Alle interface states gesynchroniseerd");
}
void setupCrossInterfaceCommunication() {
webJoystickPage.onJoystickValueFromWeb([](int x, int y) {
float distance = sqrt(x*x + y*y);
if (distance > 50) {
int maxValue = map(distance, 50, 100, 255, 128);
}
});
webDigitalPinsPage.onPinWrite([](int pin, int state) {
if (pin == 2 && state == HIGH) {
chatPage.sendToChat("📢 Systeem bewapend - extra commando's beschikbaar");
} else if (pin == 2 && state == LOW) {
chatPage.sendToChat("📢 Systeem ontwapend - alleen beperkte commando's");
}
});
}
1. Sommige interfaces laden niet
Controleer dat alle applicaties zijn toegevoegd aan server in setup()
Verifieer WebSocket verbindingen in browser console
Zorg voor voldoende geheugen voor alle interfaces
2. State inconsistenties tussen interfaces
Implementeer state synchronisatie callbacks
Gebruik gedeelde globale variabelen voor state tracking
Roep synchronisatie functies aan na grote state wijzigingen
3. Prestatie problemen met meerdere interfaces
Reduceer update frequenties voor niet-kritieke interfaces
Implementeer selectieve updates gebaseerd op actieve interface
Overweeg het uitschakelen van ongebruikte interfaces voor specifieke projecten
4. Geheugen beperkingen
Monitor beschikbaar RAM met Serial.print(freeMemory())
Schakel ongebruikte interfaces uit als geheugen krap is
Optimaliseer callback functies om geheugengebruik te minimaliseren
void debugSystemState() {
Serial.println("=== Systeem State Debug ===");
Serial.println("Vrij Geheugen: " + String(freeMemory()) + " bytes");
Serial.println("Digitale Pins:");
for (int pin = 0; pin <= 13; pin++) {
if (webDigitalPinsPage.isPinEnabled(pin)) {
Serial.println(" Pin " + String(pin) + ": " + String(pinStates[pin] ? "HIGH" : "LOW"));
}
}
Serial.println("Sliders: " + String(currentSlider1) + ", " + String(currentSlider2));
Serial.println("Joystick: X=" + String(currentJoystickX) + ", Y=" + String(currentJoystickY));
Serial.println("========================");
}