Arduino WebRotator Voorbeeld - Interactieve Rotationele Besturing Tutorial
Overzicht
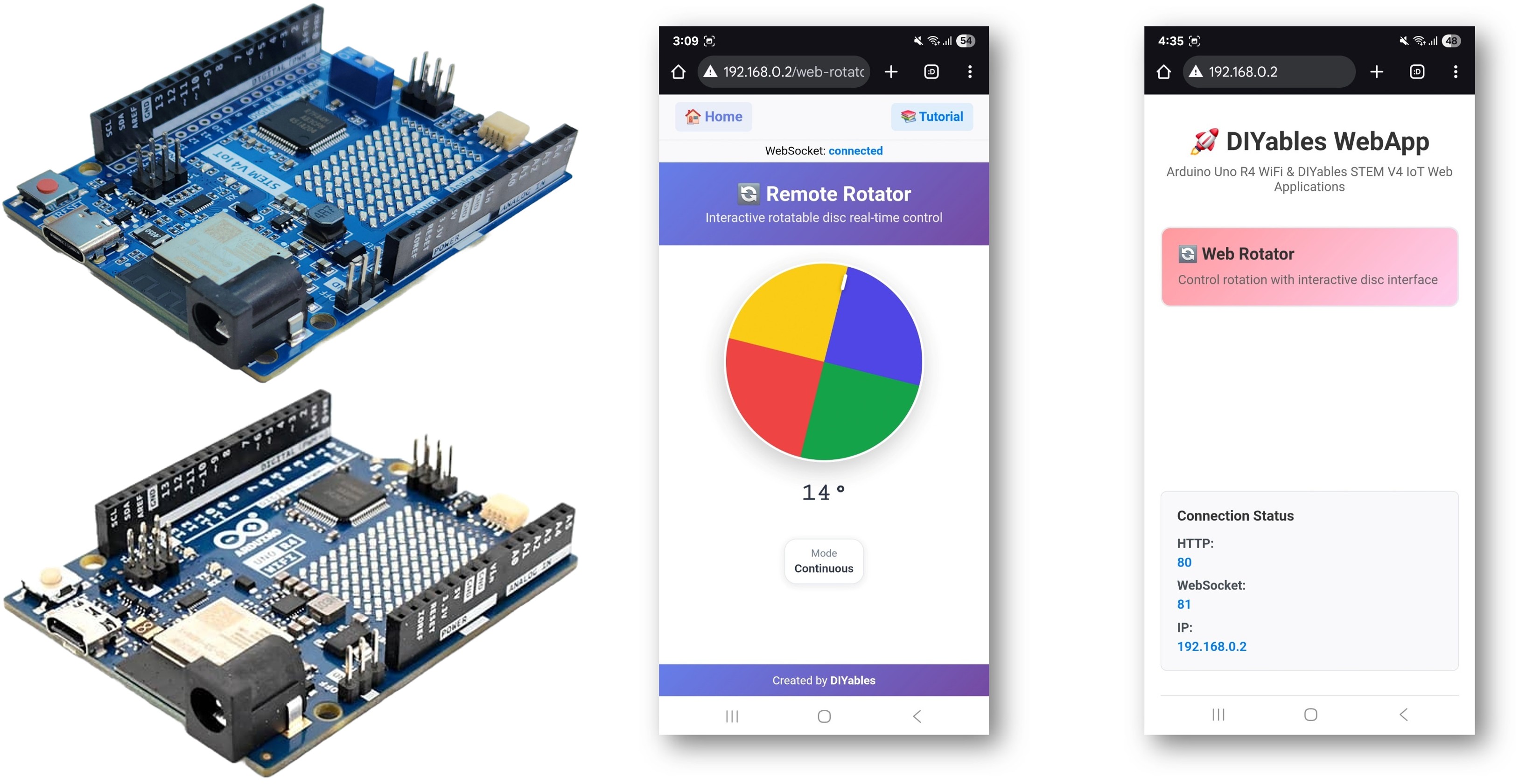
Het WebRotator voorbeeld creëert een interactieve draaibare schijfbesturing interface die toegankelijk is vanuit elke webbrowser. Ontworpen voor Arduino Uno R4 WiFi en DIYables STEM V4 IoT educatief platform met uitgebreide motorbesturing mogelijkheden, ingebouwde servo/stappenmotor besturing functies, en naadloze integratie met robotica educatieve modules. Perfect voor het besturen van servomotoren, stappenmotoren, robotarmen, antennes, of elk systeem dat precieze rotationele besturing vereist.
Functies
- Interactieve Draaibare Schijf: Touch en muis-bestuurde schijf interface
- Dubbele Bedrijfsmodi: Continu (0-360°) en Beperkt hoekbereik
- Real-time Hoekterugkoppeling: Precieze hoekweergave en besturing
- Visuele Positie-indicator: Duidelijke schijfpositie markering met gradiënt ontwerp
- Touch & Muisondersteuning: Werkt op desktop, tablet en mobiele apparaten
- Automatische Configuratie Verwerking: Stel modus en bereik eenmaal in bij constructor
- WebSocket Communicatie: Directe respons zonder pagina verversing
- Professionele UI: Conische gradiënt ontwerp met soepele rotatie
- Platform Uitbreidbaar: Momenteel geïmplementeerd voor Arduino Uno R4 WiFi, maar kan uitgebreid worden voor andere hardware platforms. Zie DIYables_WebApps_ESP32
Benodigde Hardware
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V4 IoT Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Setup Instructies
Snelle Stappen
Volg deze instructies stap voor stap:
- Als dit de eerste keer is dat u de Arduino Uno R4 WiFi/DIYables STEM V4 IoT gebruikt, raadpleeg de tutorial over het instellen van de omgeving voor Arduino Uno R4 WiFi/DIYables STEM V4 IoT in de Arduino IDE.
- Verbind het Arduino Uno R4/DIYables STEM V4 IoT board met uw computer via een USB-kabel.
- Start de Arduino IDE op uw computer.
- Selecteer het juiste Arduino Uno R4 board (bijv., Arduino Uno R4 WiFi) en COM-poort.
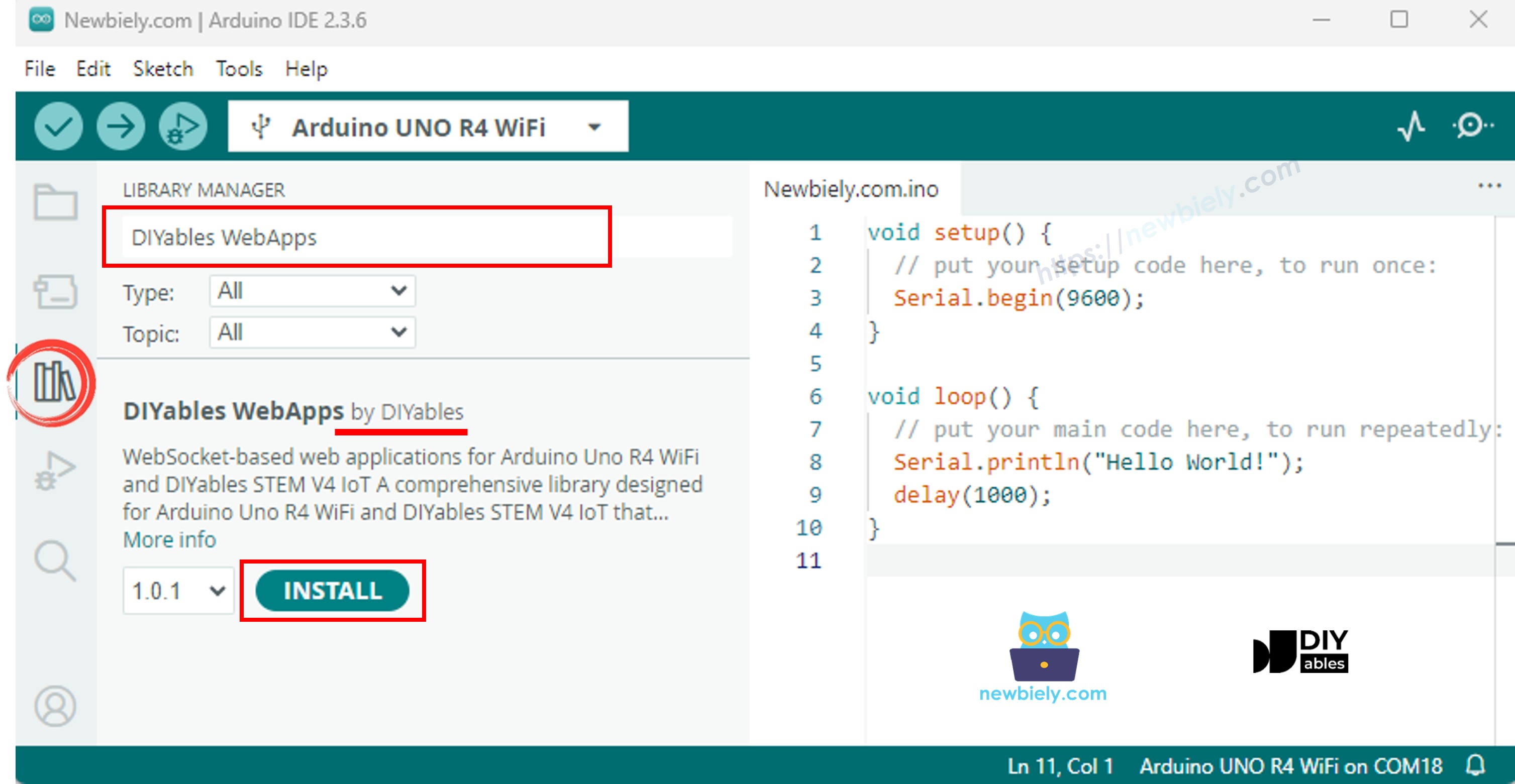
- Navigeer naar het Libraries pictogram in de linker balk van de Arduino IDE.
- Zoek "DIYables WebApps", vind vervolgens de DIYables WebApps bibliotheek door DIYables
- Klik op de Install knop om de bibliotheek te installeren.
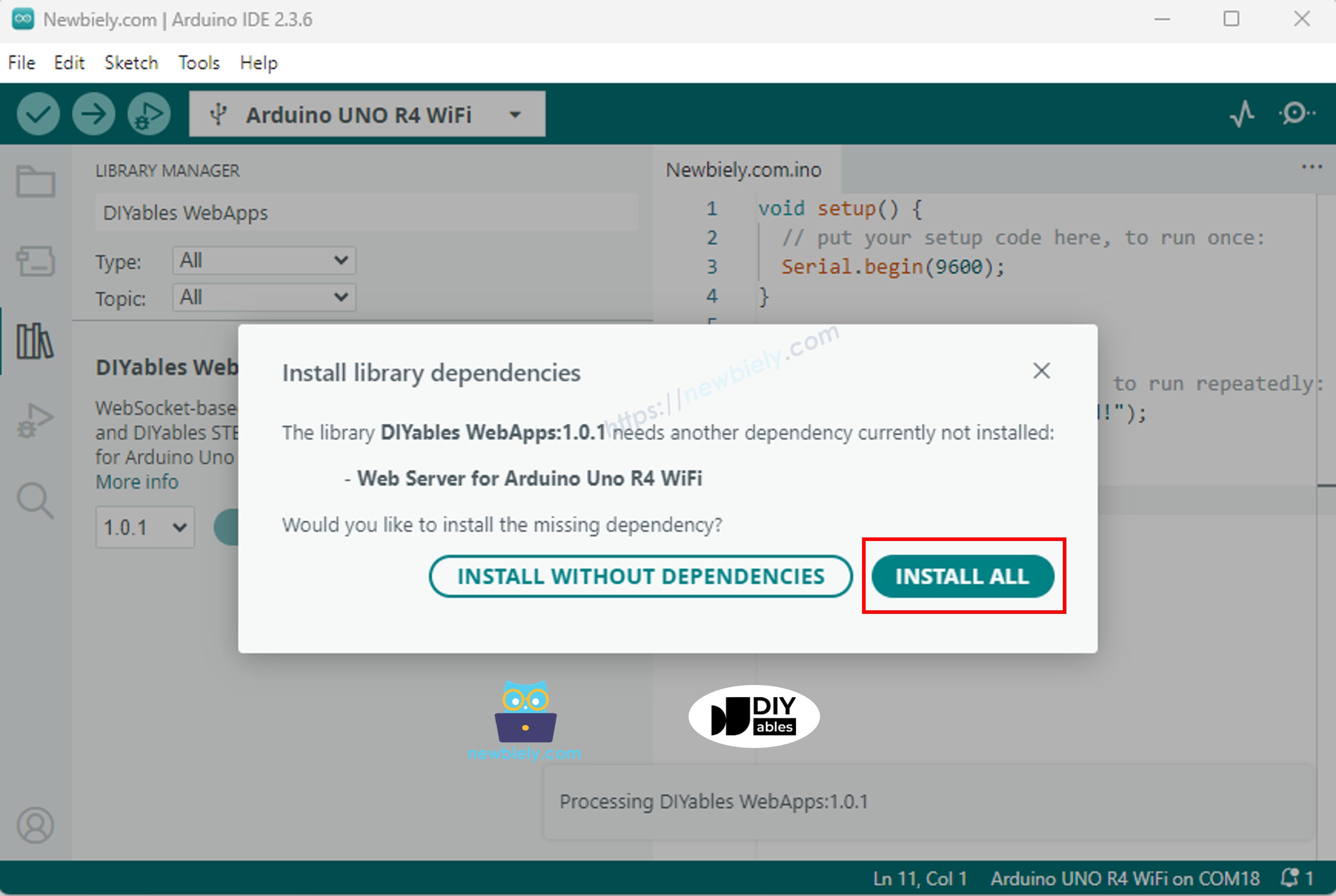
- U wordt gevraagd om enkele andere bibliotheek afhankelijkheden te installeren
- Klik op de Install All knop om alle bibliotheek afhankelijkheden te installeren.
- In Arduino IDE, ga naar File Examples DIYables WebApps WebRotator voorbeeld, of kopieer de bovenstaande code en plak het in de editor van Arduino IDE
- Configureer WiFi-referenties in de code door deze regels bij te werken:
- Klik op de Upload knop in Arduino IDE om code naar Arduino UNO R4/DIYables STEM V4 IoT te uploaden
- Open de Serial Monitor
- Bekijk het resultaat in Serial Monitor. Het ziet er uit zoals hieronder
- Als u niets ziet, herstart het Arduino board.
- Open een webbrowser op uw PC of mobiele telefoon.
- Type het IP-adres dat getoond wordt in de Serial Monitor in de webbrowser
- Voorbeeld: http://192.168.1.100
- U ziet de startpagina zoals in de onderstaande afbeelding:
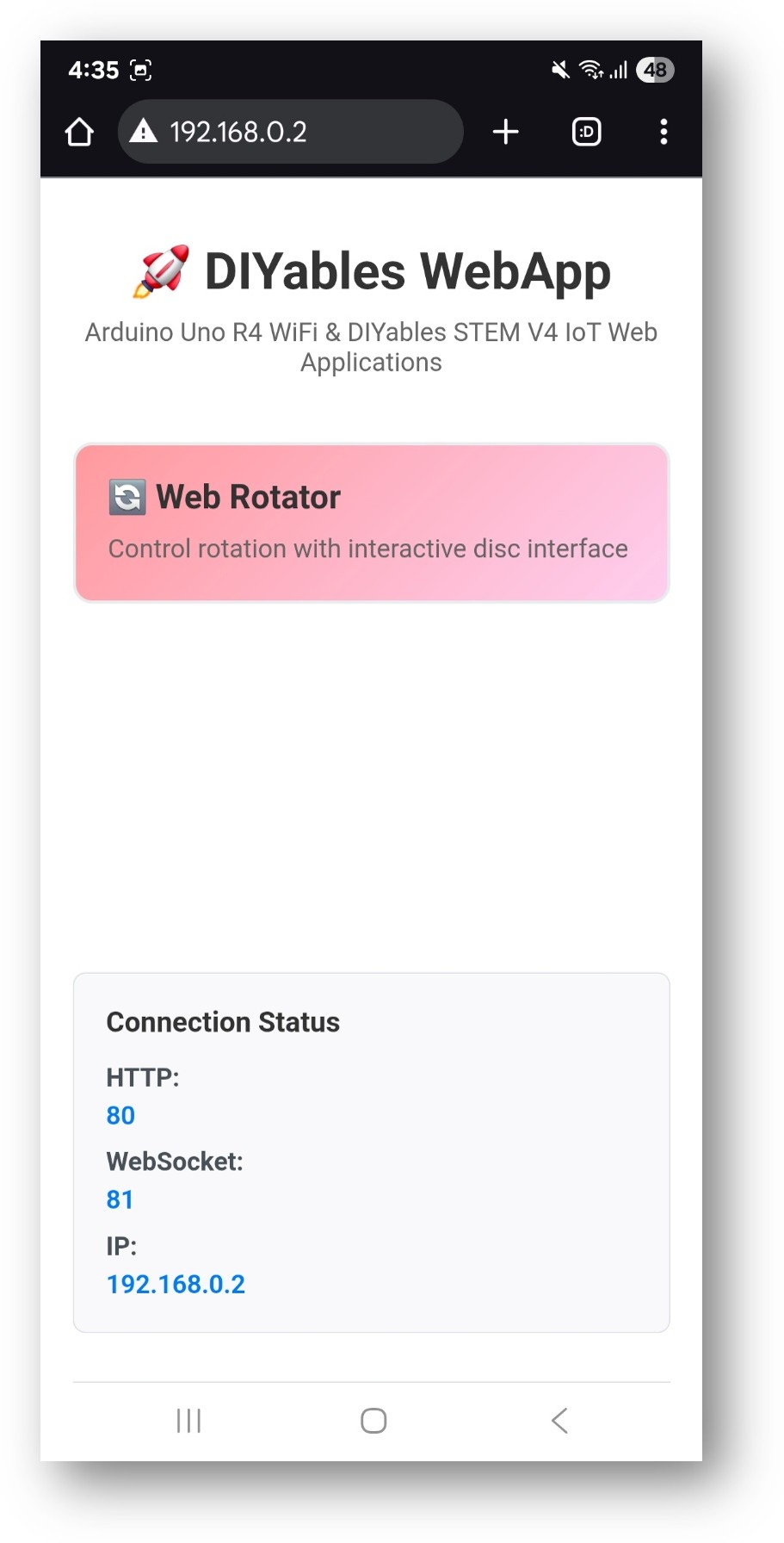
- Klik op de Web Rotator link, u ziet de Web Rotator app's UI zoals hieronder:
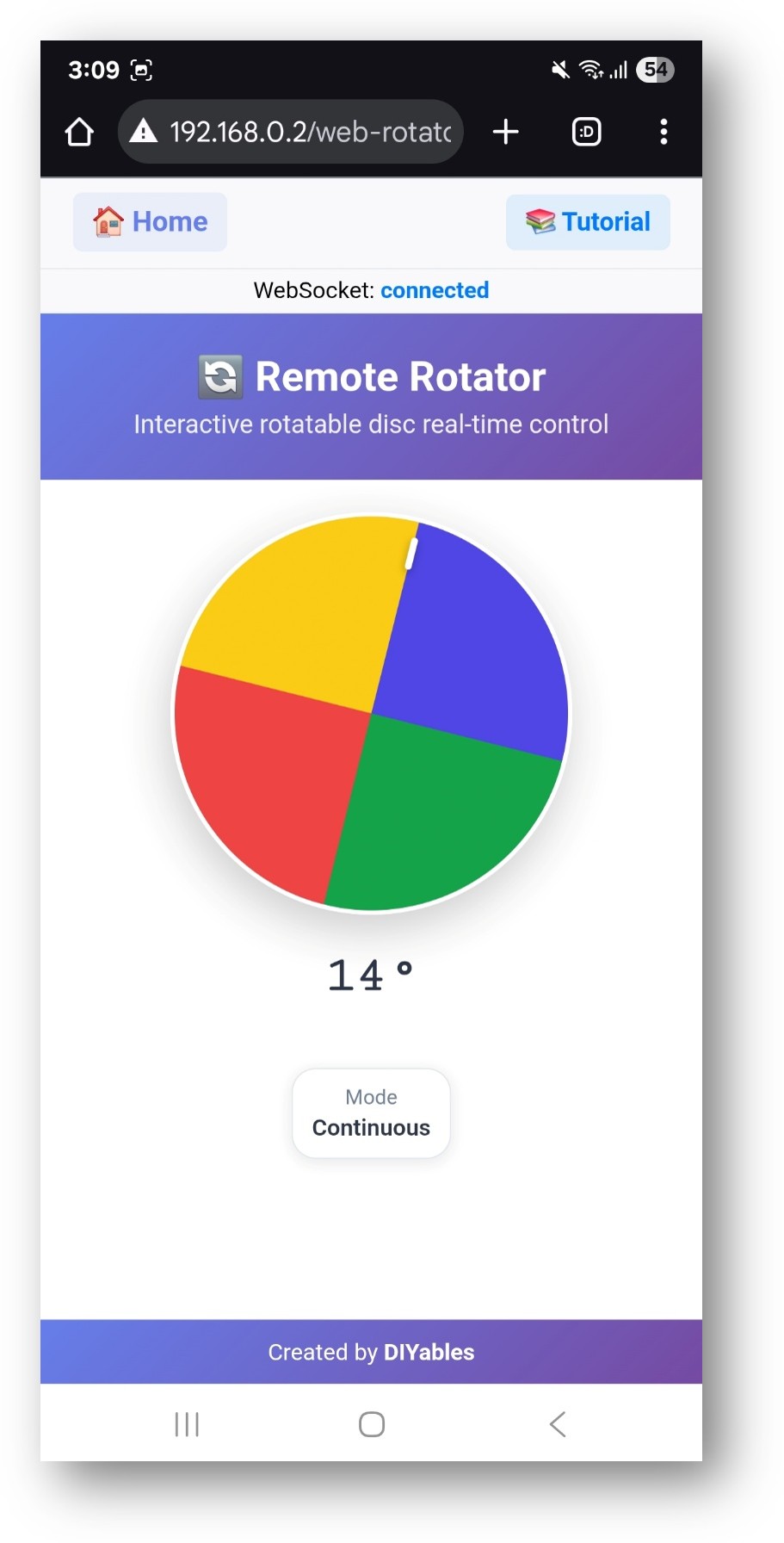
- Of u kunt ook direct naar de pagina door het IP-adres gevolgd door /web-rotator. Bijvoorbeeld: http://192.168.1.100/web-rotator
- U ziet een interactieve draaibare schijf die u kunt slepen om rotatie te besturen
Web Interface Functies
Draaibare Schijfbesturing
- Interactieve Schijf: Klik en sleep om de schijf te draaien
- Visuele Terugkoppeling: Real-time hoekweergave en positie-indicator
- Soepele Animatie: Vloeiende rotatie met professioneel gradiënt ontwerp
- Hoekweergave: Huidige hoek getoond in graden
- Modus Indicator: Toont huidige rotatie modus en limieten
Touch en Muisondersteuning
- Desktop Besturing: Muisklik en slepen
- Mobiele Besturing: Touch en swipe bewegingen
- Responsief Ontwerp: Geoptimaliseerd voor alle schermformaten
- Visuele Aanwijzingen: Duidelijke indicatoren voor interactie gebieden
Code Configuratie
Rotator Setup
Hoekcommando's Ontvangen
Bedrijfsmodi
Continue Modus
- Volledige Rotatie: 0° tot 360° en verder, zonder bovenlimiet
- Geen Omslag: Hoekwaarden kunnen boven 360° stijgen en resetten niet naar 0°
- Toepassingen: Continue rotatie servo's, antennes, draaischijven
- Configuratie: ROTATOR_MODE_CONTINUOUS
Beperkte Modus
- Aangepast Bereik: Definieer minimum en maximum hoeken
- Grenslimieten: Voorkomt rotatie buiten ingestelde limieten
- Toepassingen: Standaard servo's, robotarmen, stuursystemen
- Configuratie: ROTATOR_MODE_LIMITED, minAngle, maxAngle
Hardware Integratie
Servomotor Besturing
Opmerking: Het volgende codefragment is een gedeeltelijk voorbeeld en moet geïntegreerd worden in uw hoofdArduino sketch om correct te functioneren.
Stappenmotor Besturing
Aanpassingsopties
Hoekbereik
- Minimum Hoek: Stel laagste toegestane rotatie in
- Maximum Hoek: Stel hoogste toegestane rotatie in
- Standaardpositie: Starthoek wanneer systeem opstart
- Resolutie: Bestuur precisie van hoekupdates
Visueel Uiterlijk
De webinterface past zich automatisch aan uw configuratie aan:
- Bereikweergave: Toont geconfigureerde hoeklimieten
- Modus Indicator: Toont huidige bedrijfsmodus
- Positiemarkering: Visuele indicator van huidige hoek
- Gradiënt Ontwerp: Professioneel uiterlijk met soepele kleuren
Veelvoorkomende Toepassingen
Educatieve Projecten
- Servo Besturing Leren: PWM en servo werking begrijpen
- Robotica Onderwijs: Arm positionering, gewricht besturing
- Antenne Positionering: Directionele antenne besturing
- Camera Pan/Tilt: Externe camera positionering
Praktische Toepassingen
- Domotica: Geautomatiseerde zonwering, ventielen, deuren
- Robotica: Robotarm gewrichten, mobiele robot sturing
- IoT Projecten: Externe positioneringssystemen
- Industrieel: Geautomatiseerde positionering, klep besturing
Probleemoplossing
Rotatie Werkt Niet
- Controleer WiFi-verbinding en WebSocket status
- Verifieer dat callback functie correct is ingesteld
- Zorg ervoor dat servo/motor goed aangesloten is
- Controleer voeding voor motoren
Onjuiste Hoekwaarden
- Verifieer hoek mapping voor uw specifieke hardware
- Controleer servo bibliotheek en pin configuratie
- Zorg voor juiste schaling in callback functie
- Test met Serial Monitor uitvoer
Verbindingsproblemen
- Verifieer IP-adres in browser
- Controleer firewall instellingen
- Zorg voor 2.4GHz WiFi netwerk (5GHz niet ondersteund)
- Probeer browserpagina te verversen
Geavanceerde Functies
Runtime Modus Wijzigingen
U kunt rotator modus wijzigen tijdens bedrijf:
Positie Terugkoppeling
Stuur huidige positie terug naar de webinterface:
Opmerking: Het frequent verzenden van hoek feedback naar de webinterface kan minder soepele beweging veroorzaken. Gebruik deze functie alleen als real-time positie updates vereist zijn.
Multi-As Besturing
Combineer meerdere rotators voor complexe positionering:
Educatieve Integratie
STEM Leerdoelen
- Motorbesturing: Servo en stappenmotor werking begrijpen
- Coördinatensystemen: Hoekmeting en positionering
- Webtechnologieën: Real-time besturingsinterfaces
- Programmeren: Callback functies, hardware besturing
Klaslokaal Activiteiten
- Servo Kalibratie: Servo werking en PWM signalen leren
- Positiebesturing: Precieze positioneringstaken oefenen
- Systeemintegratie: Sensoren combineren met motorbesturing
- Probleemoplossing: Hardware en software problemen debuggen
Dit voorbeeld biedt een uitgebreide basis voor rotationele besturingssystemen, perfect voor zowel educatieve als praktische robotica toepassingen.