ESP32 WebRotator Voorbeeld - Interactieve Rotatiebesturing Tutorial
Overzicht
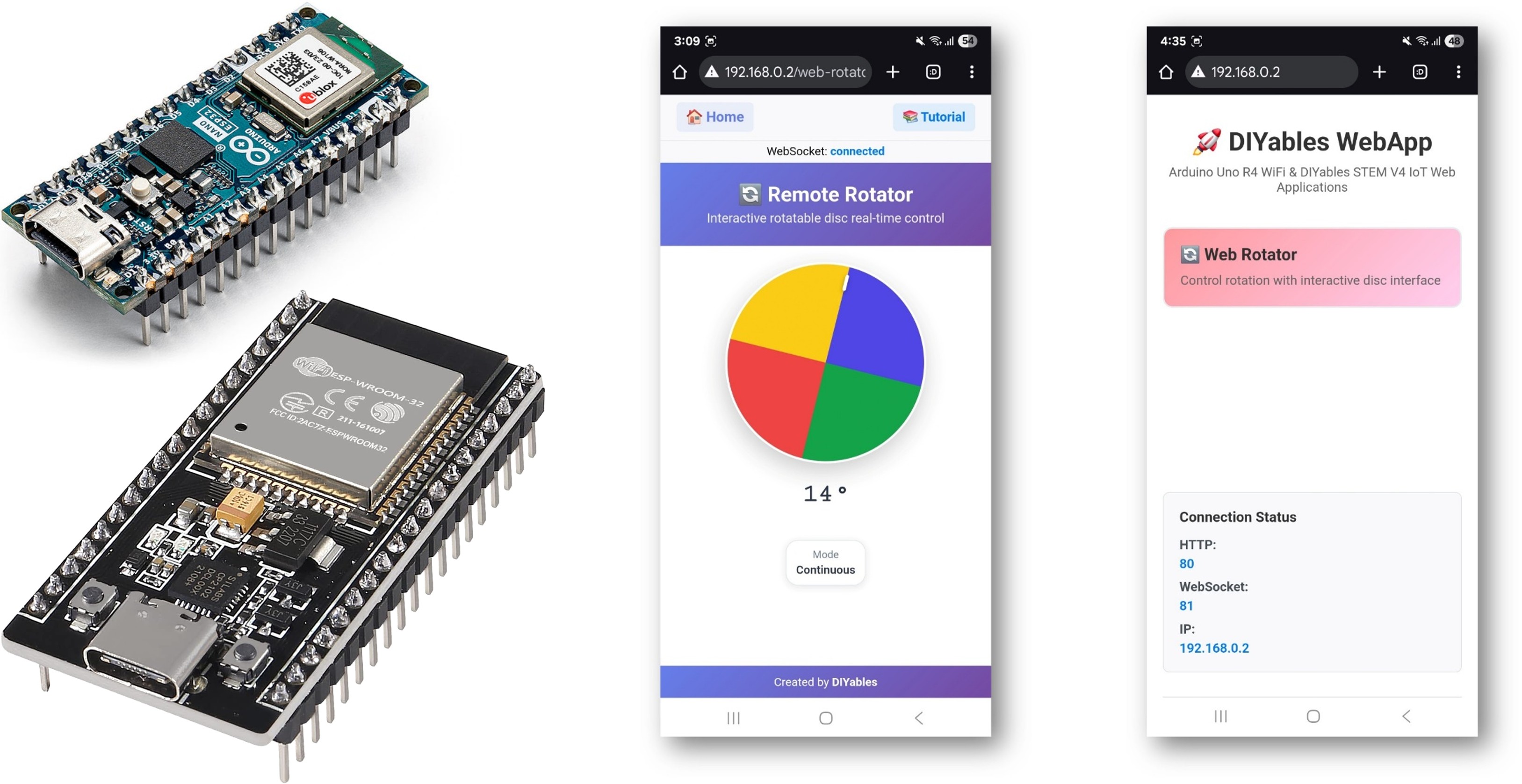
Het WebRotator voorbeeld maakt een interactieve, draaibare schijfbediening die vanaf elke webbrowser toegankelijk is. Ontworpen voor het ESP32 educatieve platform met uitgebreide motorbesturingsmogelijkheden, ingebouwde servo- en stappenmotorsturing, en naadloze integratie met educatieve robotica modules. Perfect voor het aansturen van servomotoren, stappenmotoren, robotarmen, antennes of elk systeem dat nauwkeurige rotatiebesturing vereist.
Kenmerken
- Interactieve draaibare schijf: Schijfinterface bestuurd via touch en muis
- Dubbele bedieningsmodi: Continue draaiing (0-360°) en Beperkte hoekbereik
- Realtime hoekterugkoppeling: Nauwkeurige hoekweergave en besturing
- Visuele positiemarker: Duidelijke schijfpositie-indicator met gradiëntontwerp
- Touch- & muisondersteuning: Werkt op desktop, tablet en mobiele apparaten
- Automatische configuratie: Instelling van modus en bereik in constructor éénmalig
- WebSocket communicatie: Directe respons zonder pagina-herlading
- Professionele UI: Conische gradiënt met soepele rotatie
Benodigde hardware
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Installatie-instructies
Snelle stappen
Volg deze stappen één voor één:
- Als dit uw eerste keer is met de ESP32, raadpleeg dan de tutorial over de omgeving instellen voor ESP32 in de Arduino IDE.
- Verbind de ESP32-bord met uw computer via een USB-kabel.
- Start de Arduino IDE op uw computer.
- Selecteer het juiste ESP32-bord (bijvoorbeeld ESP32 Dev Module) en de juiste COM-poort.
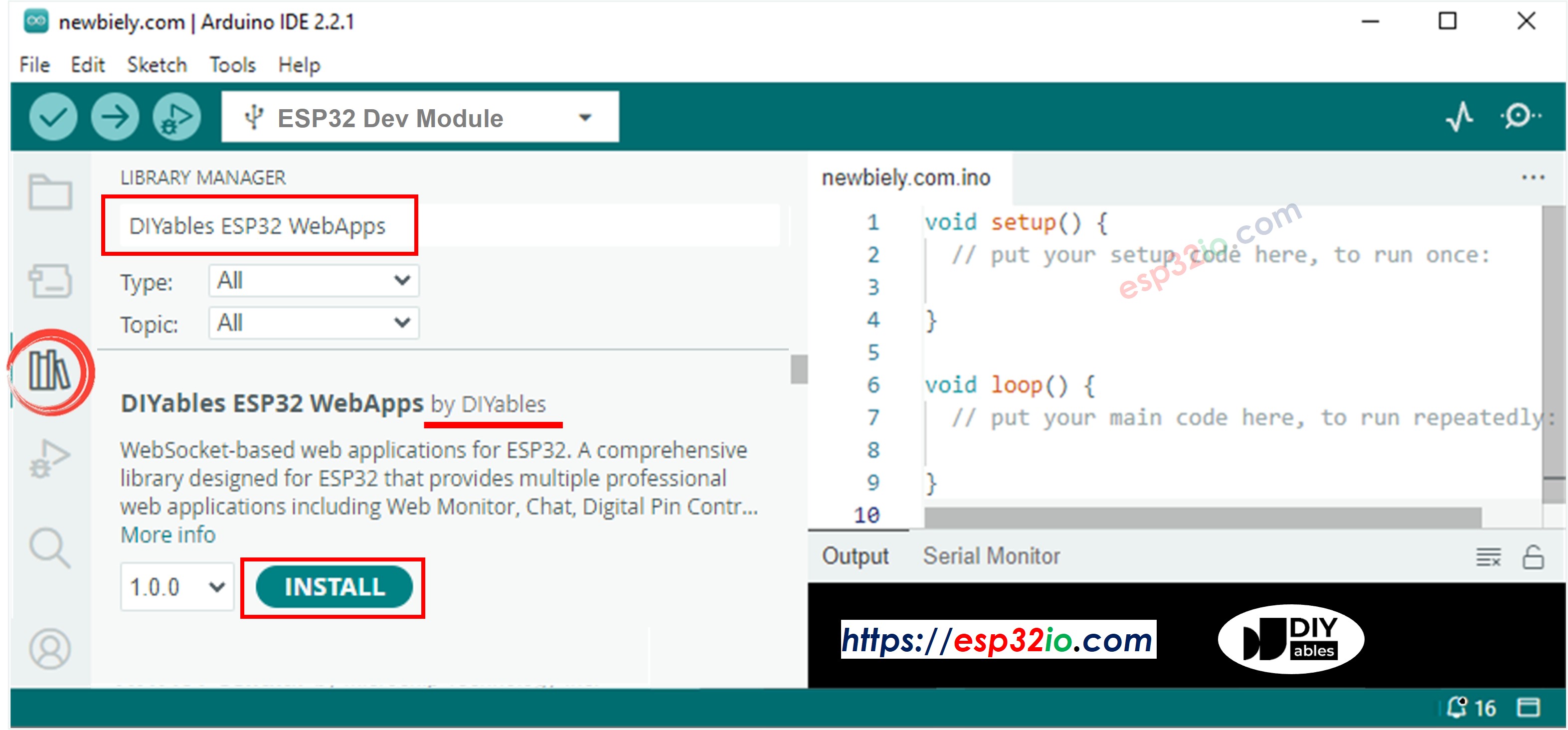
- Navigeer in de Arduino IDE naar het Libraries-icoon in de linkerzijbalk.
- Zoek op "DIYables ESP32 WebApps" en vind vervolgens de DIYables ESP32 WebApps Library van DIYables.
- Klik op de Installeren-knop om de bibliotheek te installeren.
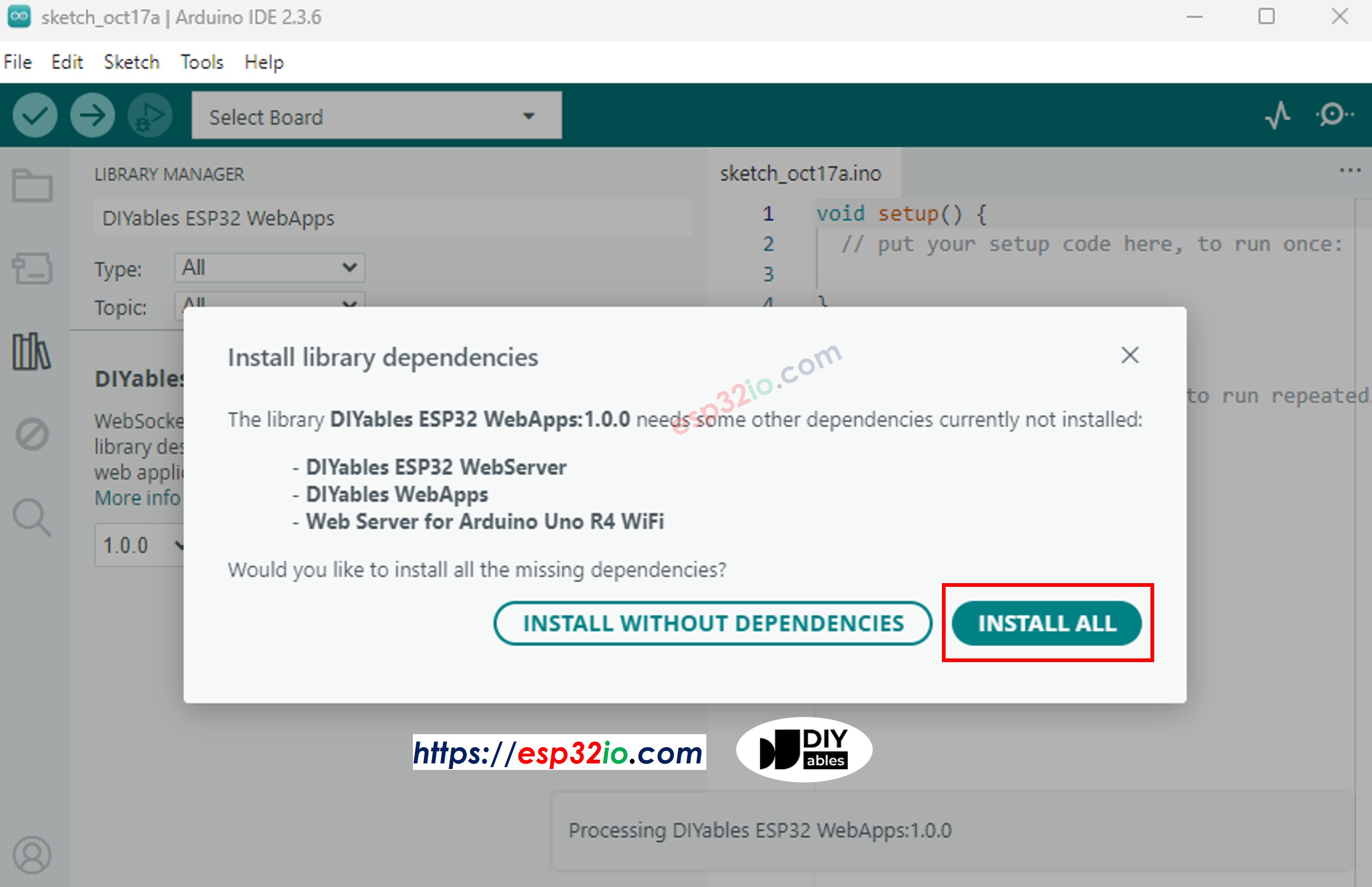
- Er wordt gevraagd om extra bibliotheekafhankelijkheden te installeren.
- Klik op de Alles installeren-knop om alle afhankelijkheden te installeren.
- Ga in Arduino IDE naar Bestand Voorbeelden DIYables ESP32 WebApps WebRotator voorbeeld, of kopieer bovenstaande code en plak die in de editor van de Arduino IDE.
- Stel de WiFi-gegevens in de code in door onderstaande regels aan te passen:
- Klik op de Upload-knop in de Arduino IDE om de code naar de ESP32 te uploaden.
- Open de Seriële Monitor.
- Bekijk het resultaat in de Seriële Monitor, het ziet er ongeveer zo uit:
- Als u niets ziet, start dan het ESP32 bord opnieuw op.
- Open een webbrowser op uw pc of mobiele telefoon.
- Voer het IP-adres in dat in de Seriële Monitor wordt weergegeven in de adresbalk van de browser.
- Voorbeeld: http://192.168.1.100
- U ziet de startpagina zoals in onderstaande afbeelding:
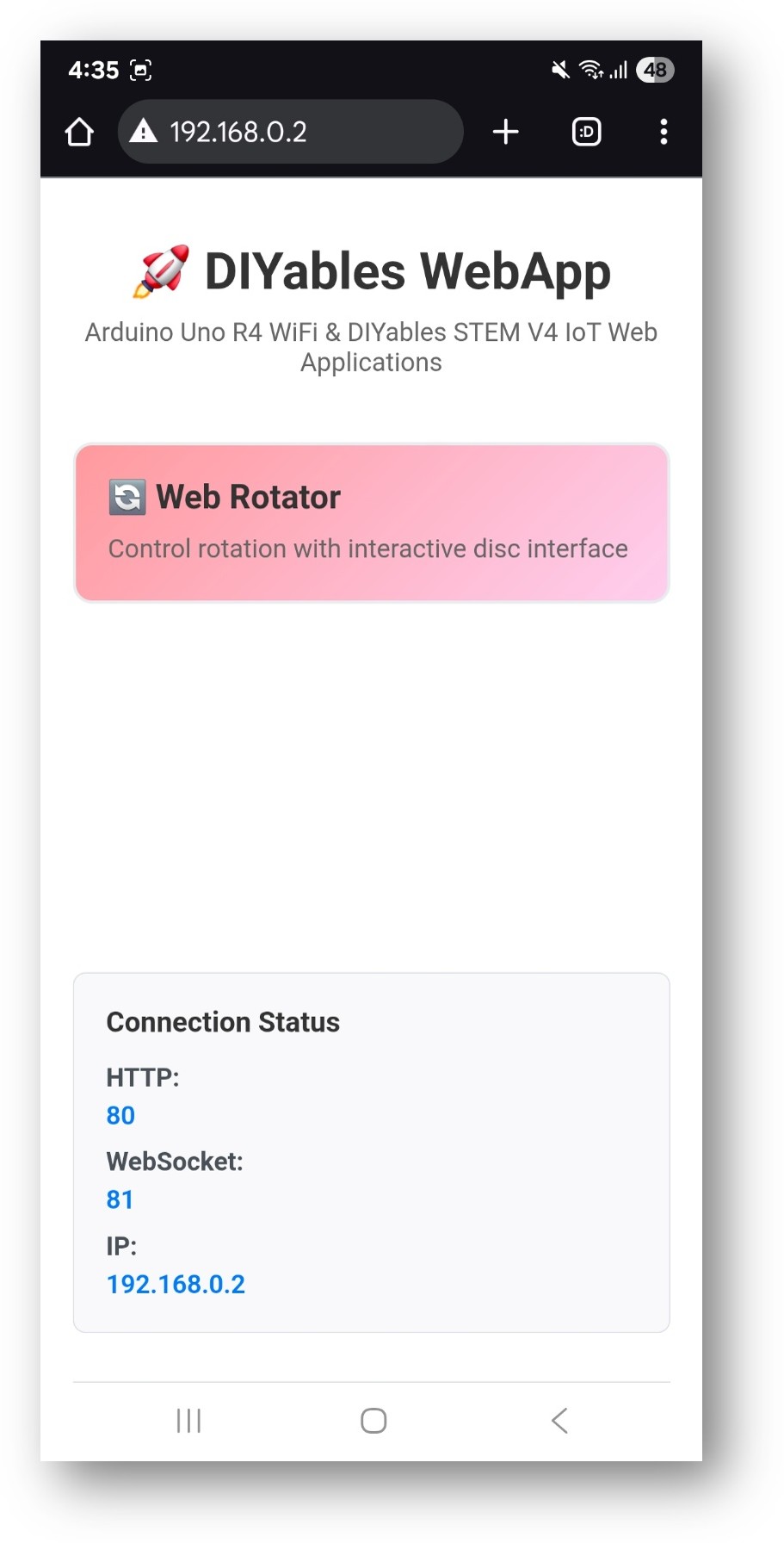
- Klik op de Web Rotator-link, u ziet de gebruikersinterface van de Web Rotator app zoals hieronder:
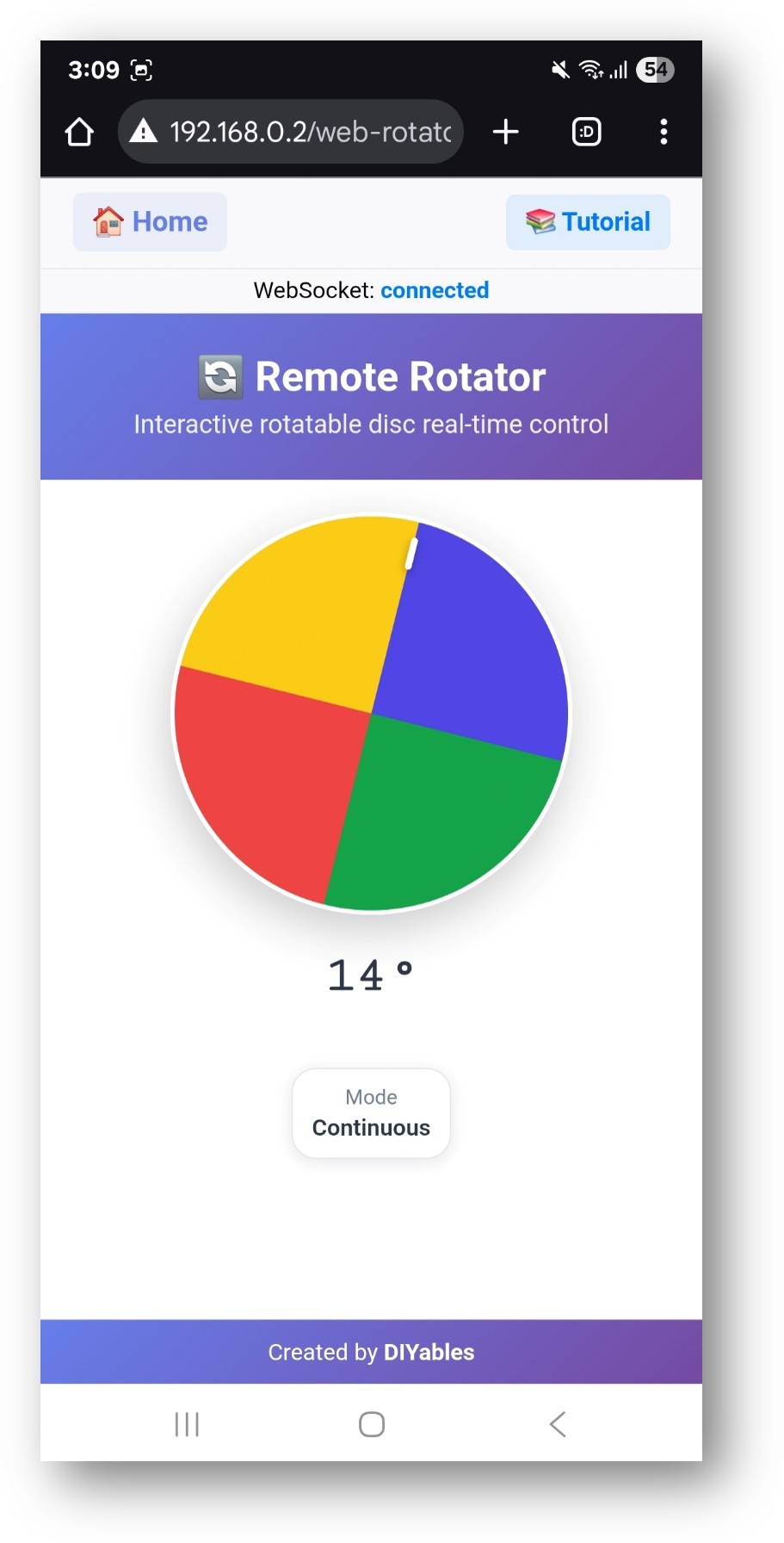
- U kunt de pagina ook direct openen door het IP-adres te volgen met /web-rotator. Bijvoorbeeld: http://192.168.1.100/web-rotator
- U ziet een interactieve draaibare schijf die u kunt verslepen om rotatie te regelen.
Webinterface Kenmerken
Draaibare Schijfbesturing
- Interactieve schijf: Klik en sleep om de schijf te draaien
- Visuele feedback: Realtime hoekweergave en positie-indicator
- Soepel animatie: Vloeiende rotatie met professioneel gradiëntontwerp
- Hoekweergave: Huidige hoek in graden weergegeven
- Modusindicator: Geeft huidige rotatiemodus en grenzen aan
Touch- en Muisondersteuning
- Desktopbesturing: Muis klikken en slepen
- Mobiele besturing: Touch- en veeggebaren
- Responsief design: Geoptimaliseerd voor alle schermgroottes
- Visuele signalen: Duidelijke aanduidingen voor interactiegebieden
Codeconfiguratie
Instelling Rotator
Ontvangen van Hoekopdrachten
Bedieningsmodi
Continue Modus
- Volledige rotatie: 0° tot 360° en meer, zonder bovengrens
- Geen wrap-around: Hoekwaarden kunnen groter worden dan 360° en resetten niet naar 0°
- Gebruik: Continue rotatie servos, antennes, draaitafels
- Configuratie: ROTATOR_MODE_CONTINUOUS
Beperkte Modus
- Aangepast bereik: Definieer minimale en maximale hoeken
- Grensbeveiliging: Voorkomt rotatie buiten ingestelde limieten
- Gebruik: Standaard servos, robotarmen, stuursystemen
- Configuratie: ROTATOR_MODE_LIMITED, minAngle, maxAngle
Hardware Integratie
Servomotorbesturing
Let op: onderstaande code is een gedeeltelijk voorbeeld en moet worden geïntegreerd in uw hoofd ESP32 sketch om correct te functioneren.
Stappenmotorbesturing
Aanpassingsopties
Hoekbereik
- Minimale hoek: Stel de laagst toegestane rotatie in
- Maximale hoek: Stel de hoogst toegestane rotatie in
- Standaardpositie: Starthoek bij het opstarten van het systeem
- Resolutie: Precisie van hoekupdates regelen
Visuele verschijning
De webinterface past zich automatisch aan uw configuratie aan:
- Bereikweergave: Toont ingestelde hoeklimieten
- Modusindicator: Toont huidige bedieningsmodus
- Positiemarker: Visuele indicator van huidige hoek
- Gradiëntontwerp: Professionele uitstraling met vloeiende kleuren
Veelvoorkomende Toepassingen
Educatieve Projecten
- Servo besturing leren: Begrip van PWM en servo werking
- Robotica educatie: Armpositionering, gewrichtsbesturing
- Antenne positionering: Richtingsbesturing antennes
- Camera Pan/Tilt: Afstandsbediening camera positionering
Praktische Toepassingen
- Domotica: Geautomatiseerde jaloezieën, ventilatie, deuren
- Robotica: Robotarm gewrichten, mobiele robotbesturing
- IoT-projecten: Afstandspositioneringssystemen
- Industrieel: Geautomatiseerde positionering, klepbediening
Problemen oplossen
Rotatie werkt niet
- Controleer WiFi-verbinding en WebSocket-status
- Verifieer of callback functie correct is ingesteld
- Controleer of servo/motor juist verbonden is
- Controleer voeding voor motoren
Foute hoekwaarden
- Controleer hoekmapping voor uw hardware
- Controleer servo bibliotheek en pinconfiguratie
- Controleer juiste schaal in callback functie
- Test met Seriële Monitor output
Verbinding niet mogelijk
- Verifieer IP-adres in de browser
- Controleer firewall-instellingen
- Gebruik 2.4 GHz WiFi netwerk (5 GHz niet ondersteund)
- Probeer browserpagina te vernieuwen
Geavanceerde functies
Wijzigen van modus tijdens runtime
U kunt tijdens gebruik de rotatormodus aanpassen:
Positieterugkoppeling
Zend de huidige positie terug naar de webinterface:
Let op: het frequent zenden van hoekupdates kan de beweging minder soepel maken. Gebruik deze functie alleen indien realtime positie-updates noodzakelijk zijn.
Meervoudige Asbesturing
Combineer meerdere rotators voor complexe positionering:
Educatieve integratie
STEM Leerdoelen
- Motorbesturing: Begrip van servo- en stappenmotorwerking
- Coördinatensystemen: Hoekmeting en positionering
- Webtechnologie: Realtime bedieningsinterfaces
- Programmeren: Callback functies, hardwarebesturing
Klassikaal gebruik
- Servo kalibratie: Leer werking van servo en PWM-signalen
- Positiebesturing: Oefen nauwkeurige positioneringsopdrachten
- Systeemintegratie: Combineer sensoren met motorbesturing
- Probleemoplossing: Debug hardware en software
Dit voorbeeld biedt een complete basis voor rotatiebesturingssystemen, ideaal voor educatieve en praktische robotica toepassingen.