ESP32 - RFID - Servo Motor
In deze handleiding leert u hoe u een RFID/NFC-tag gebruikt om een servo motor aan te sturen met een ESP32. Het werkt als volgt:
- Als een geautoriseerde tag wordt aangetikt, draait de ESP32 de servo motor naar 90°
- Als diezelfde geautoriseerde tag opnieuw wordt aangetikt, draait de ESP32 de servo motor terug naar 0°
- Dit proces wordt oneindig herhaald
Deze toepassing kan gebruikt worden om een kast, lade of deur te vergrendelen/ontgrendelen, of om een voerautomaat voor huisdieren te openen/sluiten...
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables ESP32 Starterskit (ESP32 inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over RFID/NFC RC522 Module en Servo Motor
Als u nog niet bekend bent met de RFID/NFC RC522 Module en Servo Motor (pinout, werking, programmeren...), kunt u meer leren in de volgende tutorials:
- ESP32 - RFID/NFC RC522 tutorial
- ESP32 - Servo Motor tutorial
Hoe Het Werkt
- De UIDs van bepaalde RFID/NFC-tags zijn vooraf ingesteld in de ESP32 code
- De gebruiker tikt een RFID/NFC-tag aan op de RFID/NFC-lezer
- De lezer leest de UID van de tag
- De ESP32 ontvangt de UID van de lezer
- De ESP32 vergelijkt de uitgelezen UID met de vooraf gedefinieerde UIDs
- Als de UID overeenkomt met een van de gedefinieerde UIDs, stuurt de ESP32 de servo motor naar 90°
- Bij opnieuw aantikken van de tag stuurt de ESP32 de servo motor terug naar 0°
- Dit proces wordt oneindig herhaald
Bedradingsschema
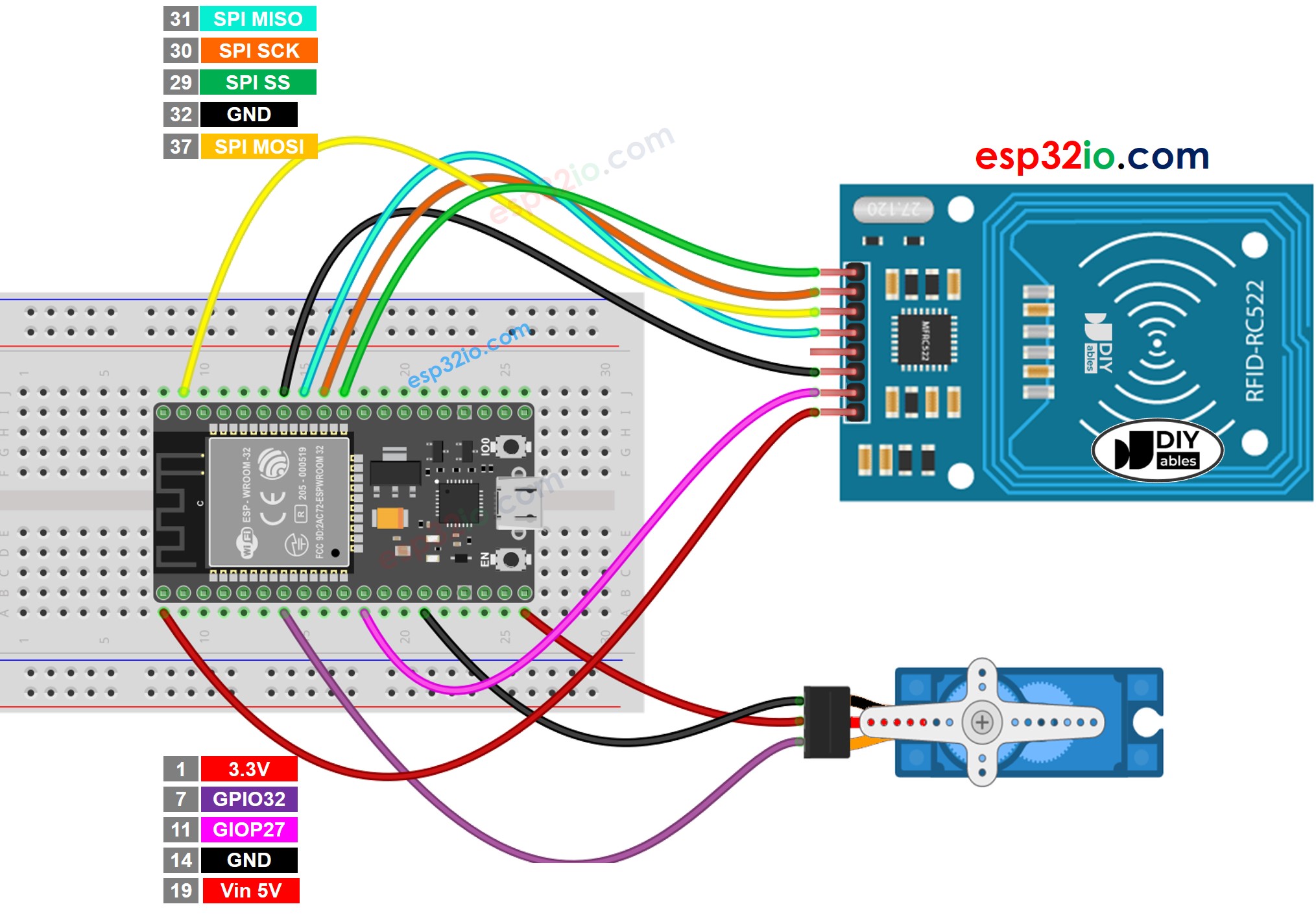
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Als u niet weet hoe u ESP32 en andere componenten van stroom moet voorzien, vindt u instructies in de volgende tutorial: Hoe ESP32 van stroom te voorzien.
※ Notiz:
De volgorde van de pinnen kan per fabrikant verschillen. Gebruik ALTIJD de op het module geprinte labels. Bovenstaande afbeelding toont de pinout van modules van de fabrikant DIYables.
ESP32 Code - Enkel RFID/NFC Tag
Snelle Stappen
- Gebruikt u voor het eerst een ESP32, zie dan hoe u de omgeving instelt voor ESP32 in Arduino IDE.
- Sluit alles aan volgens het bovenstaande schema.
- Verbind de ESP32 met uw PC via een micro USB-kabel.
- Open Arduino IDE op uw PC.
- Selecteer het juiste ESP32 bord (bijv. ESP32 Dev Module) en COM-poort.
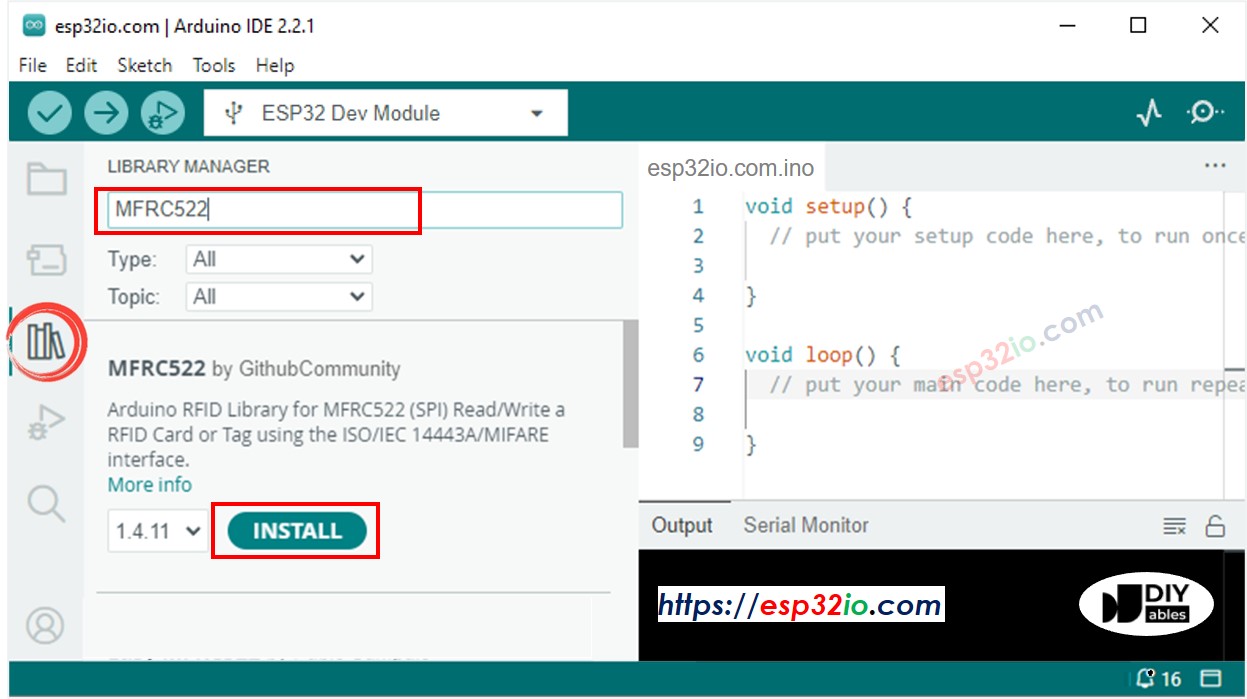
- Klik op het Libraries icoon in de linker balk van Arduino IDE.
- Zoek op “MFRC522” en vind de bibliotheek van GithubCommunity.
- Klik op de Installeren knop om de MFRC522 bibliotheek te installeren.
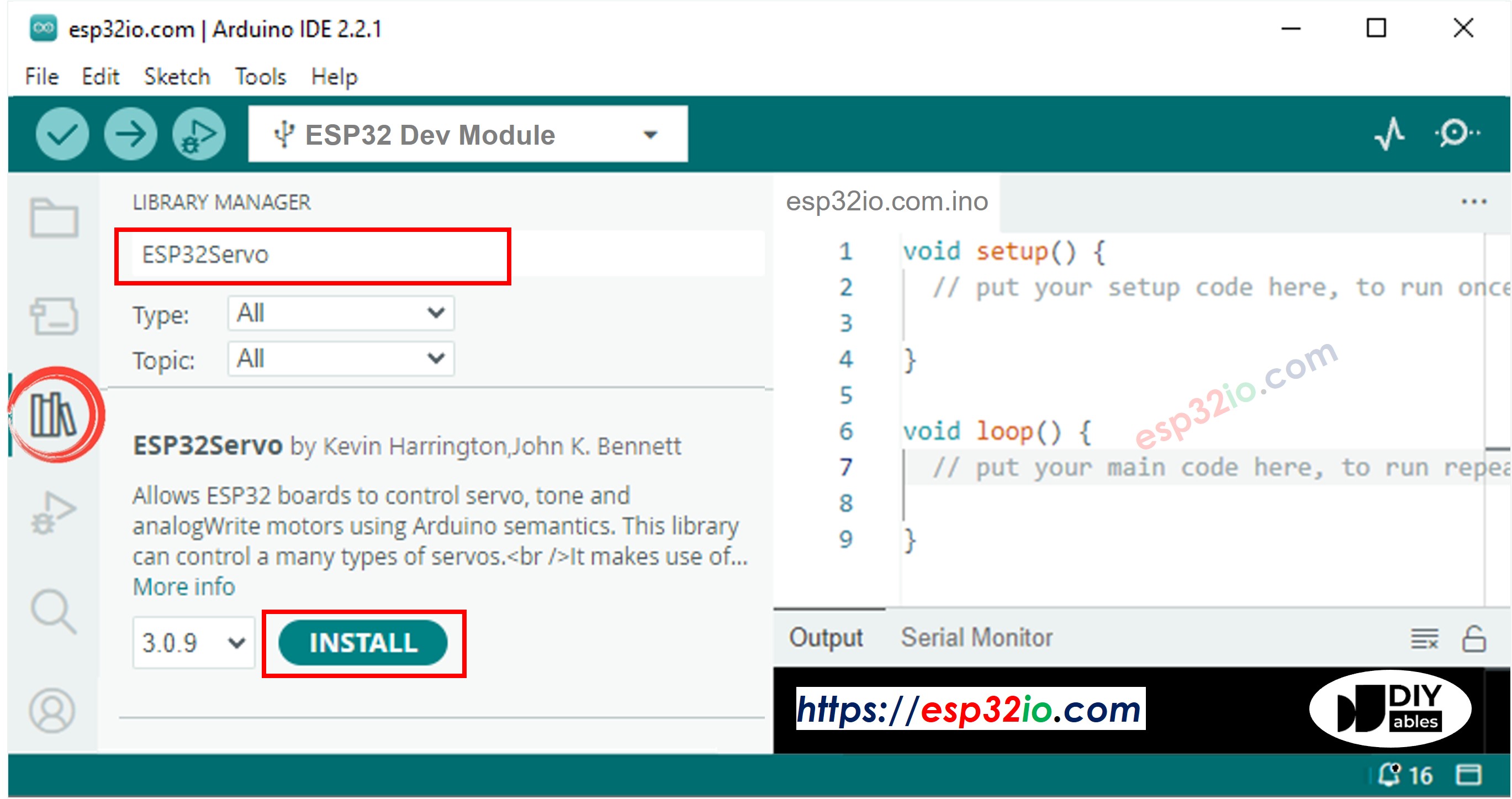
- Typ ESP32Servo in het zoekvak en zoek de servo bibliotheek van Kevin Harrington, John K. Bennett.
- Klik op de Installeren knop om de servo motor bibliotheek voor ESP32 te installeren.
Omdat de UID meestal niet op de RFID/NFC-tag is afgedrukt, is de eerste stap het achterhalen van de UID van de tag. Dit doet u als volgt:
- Kopieer bovenstaande code en open deze in Arduino IDE
- Klik op de Upload knop om de code naar de ESP32 te uploaden
- Open de Seriële Monitor
- Tik een RFID/NFC-tag op de RFID-RC522 module
- Lees de UID af in de Seriële Monitor
Nadat u de UID hebt:
- Werk de UID bij in regel 20 van bovenstaande code. Bijvoorbeeld verander byte authorizedUID[4] = {0xFF, 0xFF, 0xFF, 0xFF}; NAAR byte authorizedUID[4] = {0x3A, 0xC9, 0x6A, 0xCB};
- Upload de code opnieuw naar ESP32
- Tik een RFID/NFC-tag op de RFID-RC522 module
- U zult zien dat de servo motor naar 90° draait
- Bekijk de output in Seriële Monitor
- Tik nogmaals dezelfde RFID/NFC-tag op de RFID-RC522 module
- U zult zien dat de servo motor terug naar 0° draait
- Bekijk de output in Seriële Monitor
- Tik een andere RFID/NFC-tag op de RFID-RC522 module
- Bekijk de output in Seriële Monitor
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten en helpt u het project sneller te begrijpen.