ESP32 - Ultrasone Sensor - Servo Motor
Deze tutorial laat u zien hoe u de ESP32 gebruikt in combinatie met een potentiometer om een servo motor aan te sturen. In detail:
- De ESP32 draait automatisch een servo motor naar 90° wanneer een object dicht bij de ultrasone sensor is
- De ESP32 draait automatisch een servo motor terug naar 0° wanneer een object verder van de ultrasone sensor is verwijderd
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Ultrasone Sensor
Wij hebben specifieke tutorials over servo motor en ultrasone sensor. Elke tutorial bevat gedetailleerde informatie en stap-voor-stap instructies over hardware pinout, werkingsprincipe, bedrade verbinding met ESP32, ESP32 code... Leer meer over deze onderwerpen via de volgende links:
Bedradingsschema
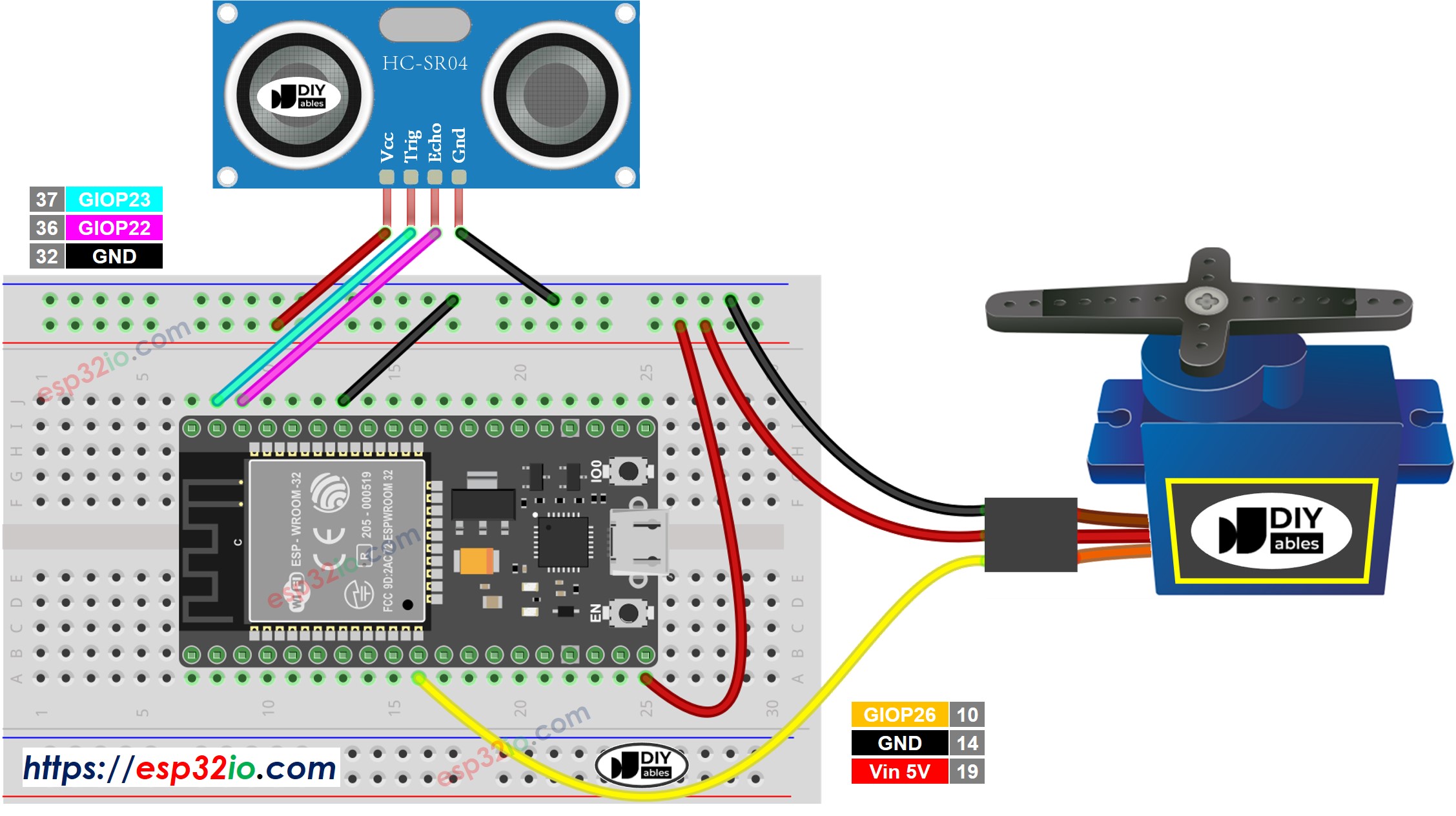
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
ESP32 Code - Ultrasone Sensor bestuurt Servo Motor
Snelle Stappen
- Als dit de eerste keer is dat u met ESP32 werkt, bekijk dan hoe u de omgeving instelt voor ESP32 in Arduino IDE.
- Voer de bedrading uit volgens de afbeelding hierboven.
- Verbind de ESP32 board met uw PC via een micro USB-kabel.
- Open Arduino IDE op uw PC.
- Selecteer het juiste ESP32 board (bijv. ESP32 Dev Module) en de juiste COM-poort.
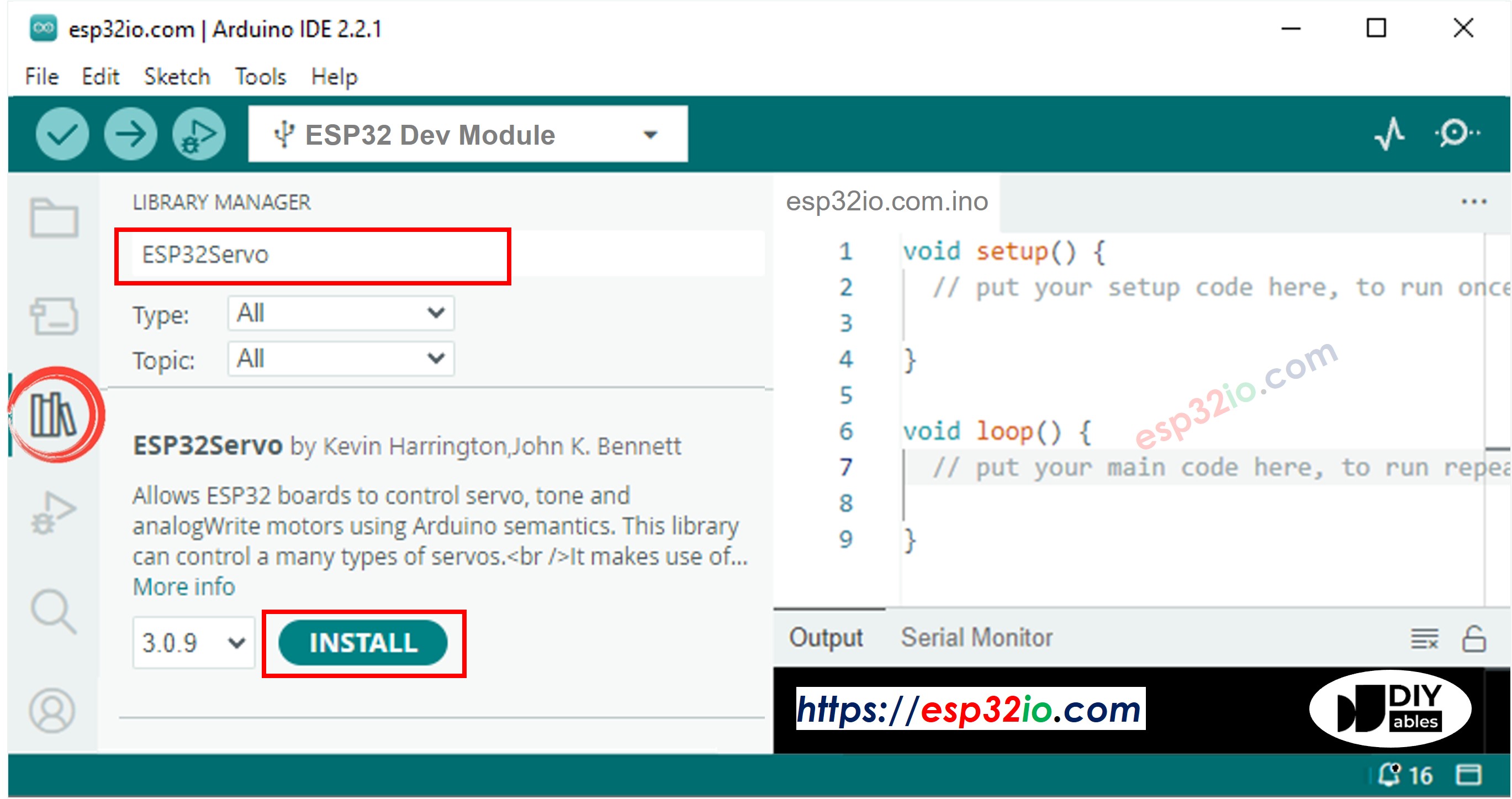
- Klik op het Libraries-icoon in de linkerzijbalk van Arduino IDE.
- Typ ESP32Servo in het zoekvak en zoek de servo bibliotheek van Kevin Harrington, John K. Bennett.
- Klik op de Installeren-knop om de servo motor bibliotheek voor ESP32 te installeren.
- Kopieer de bovenstaande code en plak deze in Arduino IDE.
- Compileer en upload de code naar de ESP32 board door op de Upload-knop in Arduino IDE te klikken.
- Beweeg uw hand voor de sensor.
- Kijk hoe de servo motor verandert van positie.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.