ESP32 - Servo Motor aangestuurd door Potentiometer
Deze handleiding legt uit hoe u ESP32 gebruikt in combinatie met een servo motor en een potentiometer. Meer specifiek is de hoek van een servo motor recht evenredig met de waarde die wordt uitgelezen van een potentiometer.
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Potentiometer
We hebben aparte tutorials over servo motor en potentiometer. Elke tutorial bevat gedetailleerde informatie en stapsgewijze instructies over hardware pinout, werkingsprincipe, bekabeling naar ESP32 en ESP32 code… Leer meer over deze onderwerpen via de volgende links:
- ESP32 - Servo Motor tutorial
- ESP32 - Potentiometer tutorial
Bedradingsschema
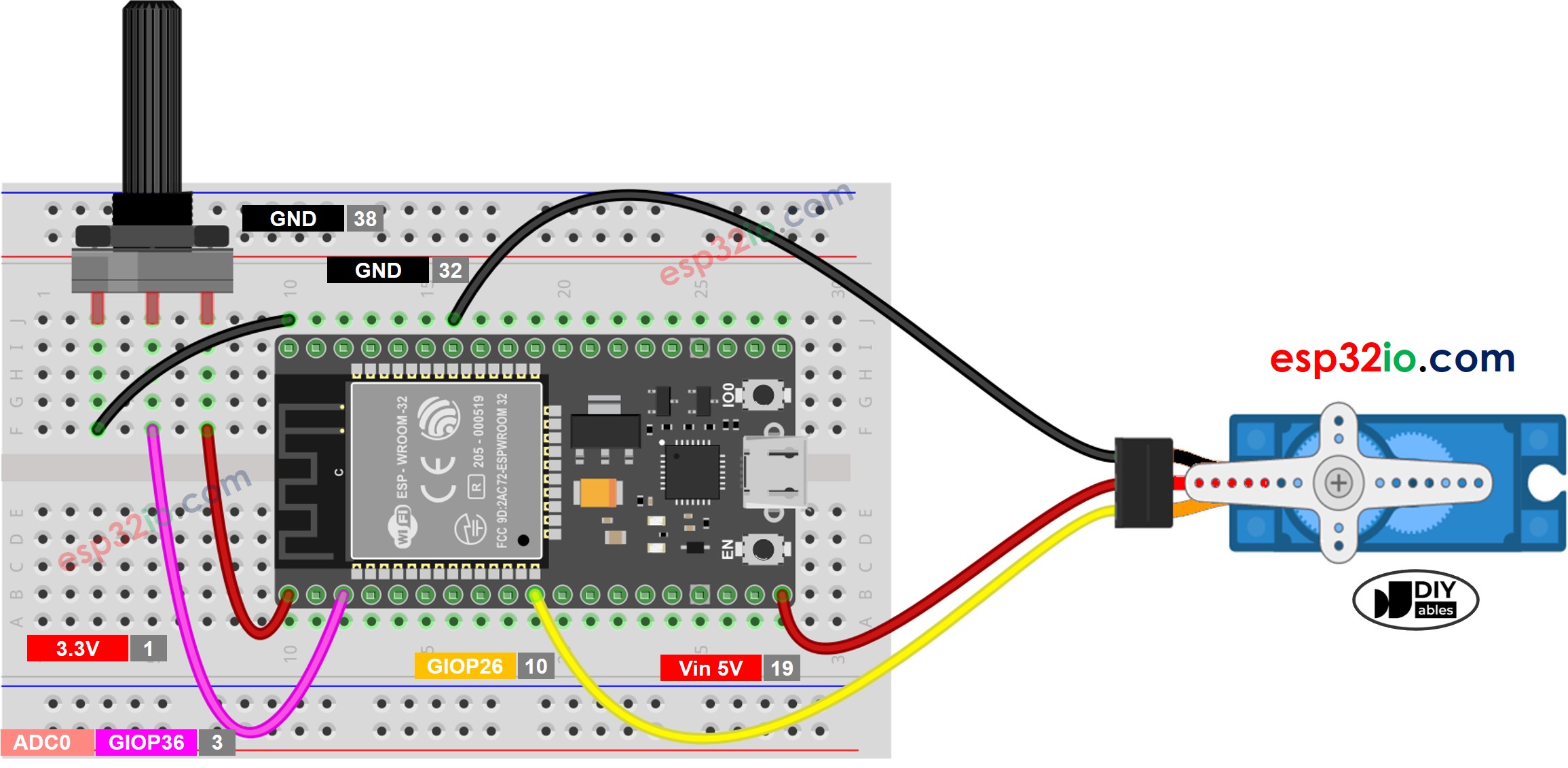
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
ESP32 Code
Snelle Stappen
- Als u ESP32 voor het eerst gebruikt, bekijk dan hoe u de omgeving instelt voor ESP32 in Arduino IDE.
- Maak de bedrading volgens bovenstaand schema.
- Verbind de ESP32-module met uw PC via een micro USB-kabel.
- Open Arduino IDE op uw PC.
- Selecteer het juiste ESP32 board (bijv. ESP32 Dev Module) en de juiste COM-poort.
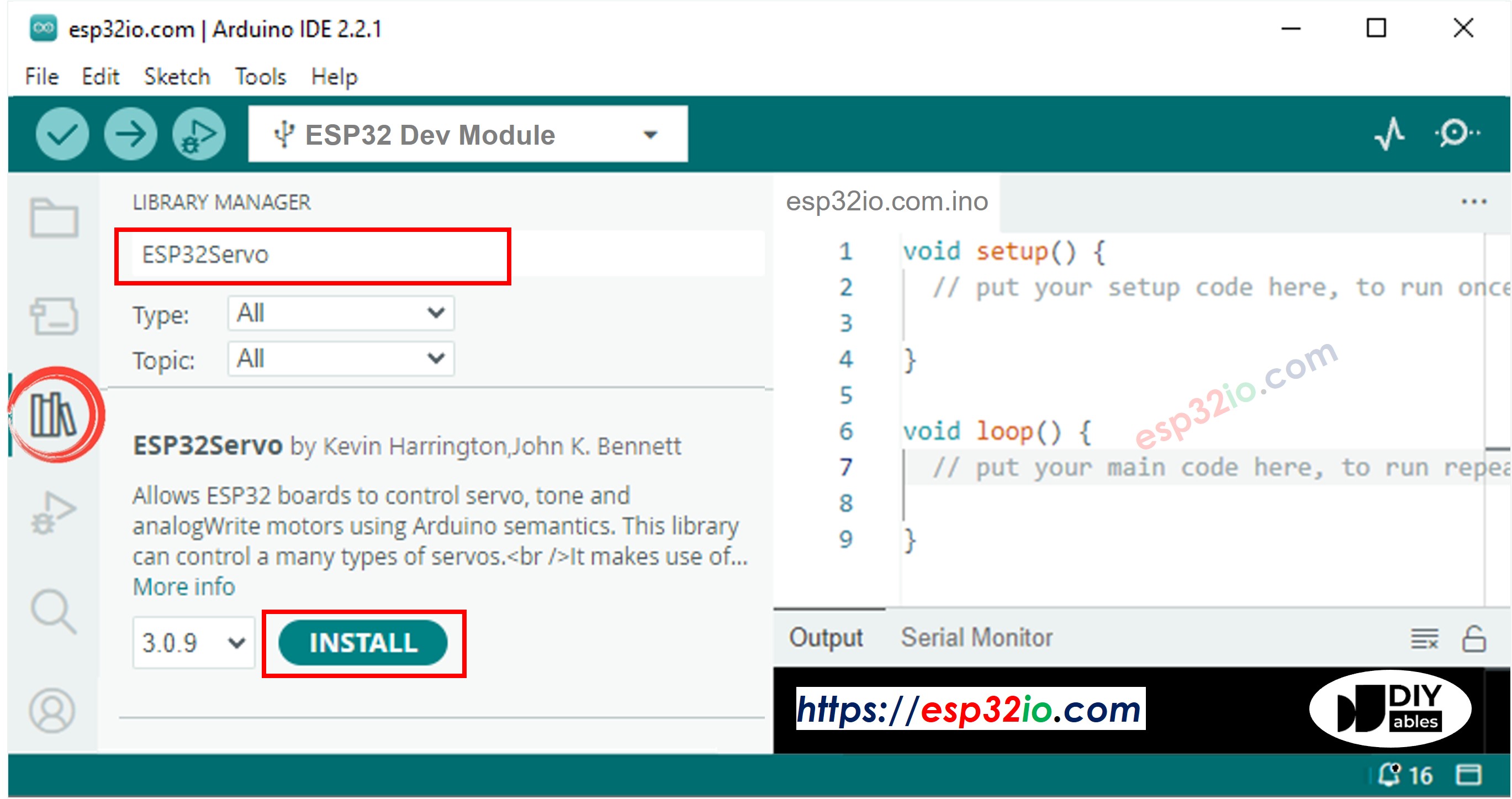
- Klik op het Libraries icoon in de linkerzijbalk van de Arduino IDE.
- Typ ESP32Servo in het zoekveld en zoek de servo bibliotheek van Kevin Harrington, John K. Bennett.
- Klik op Install om de servo motor bibliotheek voor ESP32 te installeren.
- Kopieer de bovenstaande code en plak deze in Arduino IDE.
- Compileer en upload de code naar de ESP32 door te klikken op de Upload knop in Arduino IDE.

- Open de Seriële Monitor in Arduino IDE.

- Stel de potentiometer af.
- Kijk hoe de servo motor draait.
- Bekijk het resultaat op de Seriële Monitor. Dit ziet eruit als volgt:
Regel-voor-regel Code Uitleg
De bovenstaande ESP32 code bevat uitleg per regel. Lees alstublieft de opmerkingen in de code!
※ Notiz:
Deze tutorial maakt gebruik van de functie analogRead() om waarden uit te lezen van een ADC (Analog-to-Digital Converter) die verbonden is met een potentiometer. De ESP32 ADC is geschikt voor projecten die GEEN hoge nauwkeurigheid vereisen. Voor projecten die wel precieze metingen nodig hebben, let op het volgende:
- De ESP32 ADC is niet perfect nauwkeurig en kan kalibratie vereisen voor correcte resultaten. Elk ESP32 board kan iets afwijken, dus u dient de ADC per bord te kalibreren.
- Kalibratie kan lastig zijn, vooral voor beginners, en levert mogelijk niet altijd de gewenste exacte resultaten op.
Voor projecten met hoge precisie kunt u overwegen een externe ADC (bijv. ADS1115) te gebruiken met de ESP32, of een Arduino te gebruiken, die doorgaans een betrouwbaardere ADC heeft. Wilt u toch de ESP32 ADC kalibreren, raadpleeg dan de ESP32 ADC Calibration Driver
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten over het aansluiten en programmeren van de servo motor met potentiometer op ESP32.