ESP32 - MG996R
In deze handleiding gaan we leren hoe u de MG996R high-torque servo motor kunt gebruiken met ESP32.
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over de Servo Motor
De MG996R servo motor is een high-torque (hoog koppel) servo motor die in staat is om tot 15 kg gewicht te tillen. De motor kan zijn as draaien van 0° tot 180°, wat precieze controle over de hoekpositie mogelijk maakt. Voor basisinformatie over servo motoren verwijzen we u naar de ESP32 - Servo Motor handleiding.
Pinout
De MG996R servo motor die in dit voorbeeld wordt gebruikt, heeft drie pinnen:
- VCC pin: (meestal rood) moet worden aangesloten op VCC (4.8V – 7.2V)
- GND pin: (meestal zwart of bruin) moet worden aangesloten op GND (0V)
- Signaal pin: (meestal geel of oranje) ontvangt het PWM besturingssignaal van een pin van de ESP32.

Bedradingsschema
Omdat de MG996R een high-torque servo motor is, verbruikt deze motor veel stroom. We mogen deze motor daarom niet voeden via de 5V pin van de ESP32. In plaats daarvan moeten we een externe voeding gebruiken voor de MG996R servo motor.
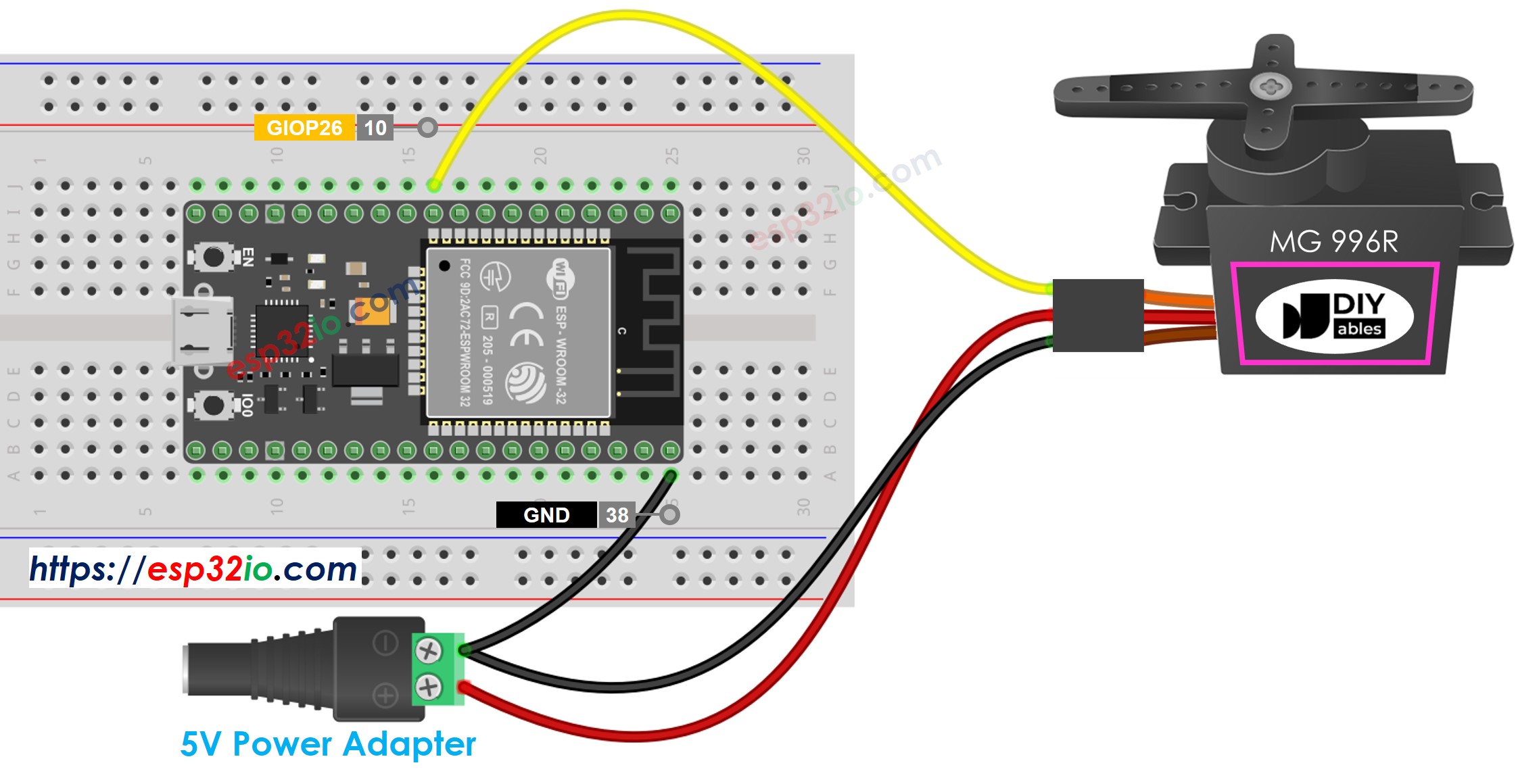
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
ESP32 Code
Snel aan de slag
- Als u voor het eerst met ESP32 werkt, bekijk dan hoe u de omgeving instelt voor ESP32 op Arduino IDE.
- Maak de bedrading zoals afgebeeld in de afbeelding hierboven.
- Sluit de ESP32 aan op uw pc via een micro USB-kabel.
- Open de Arduino IDE op uw pc.
- Selecteer het juiste ESP32 bord (bijv. ESP32 Dev Module) en COM-poort.
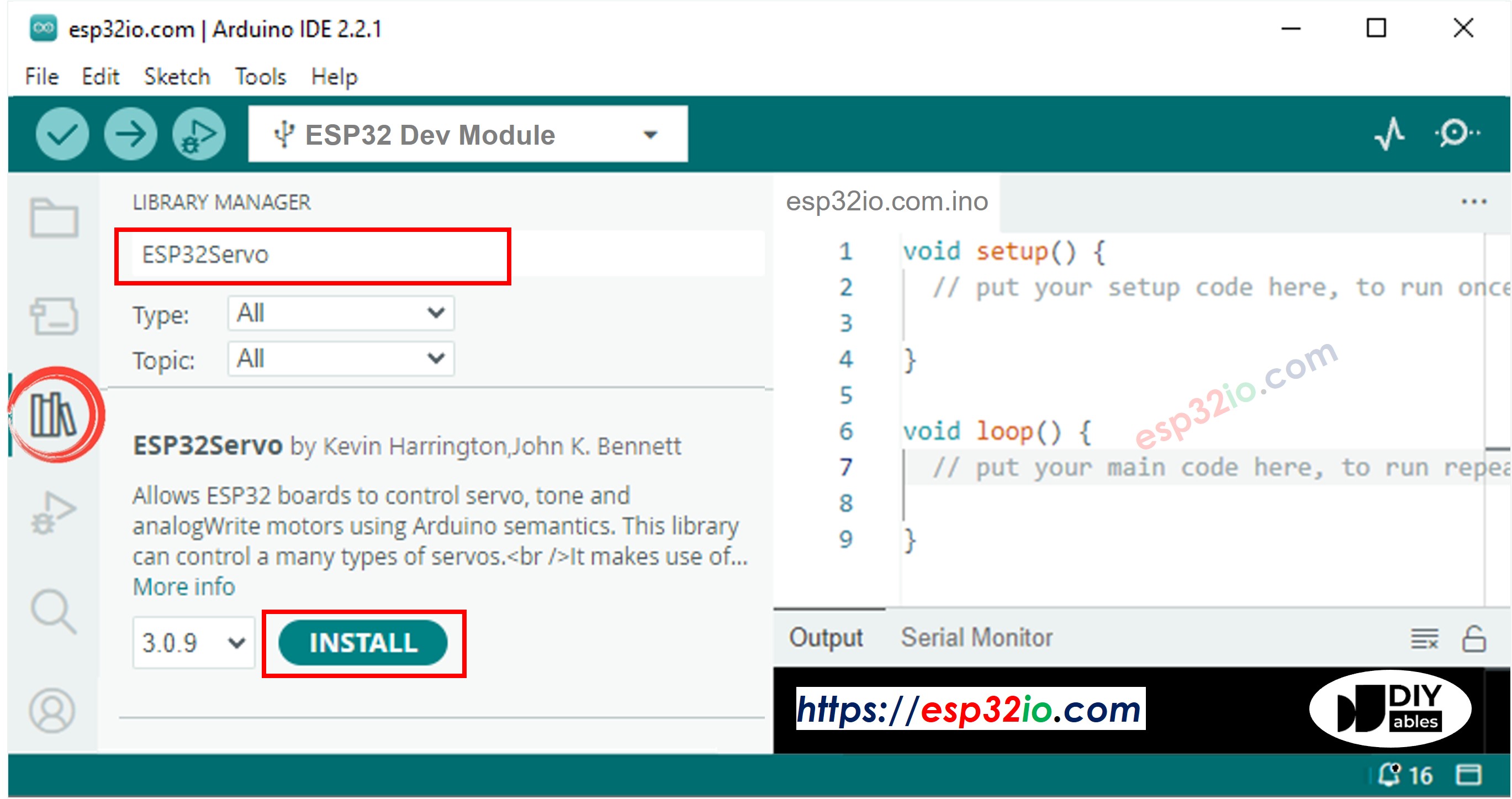
- Klik op het Libraries icoon in de linker zijbalk van de Arduino IDE.
- Typ ESP32Servo in het zoekvak en zoek de servo bibliotheek van Kevin Harrington, John K. Bennett.
- Klik op de Install knop om de servo motor bibliotheek voor ESP32 te installeren.
- Verbind ESP32 met uw pc via USB-kabel
- Open Arduino IDE, selecteer het juiste bord en de juiste poort
- Kopieer de bovenstaande code en open deze in Arduino IDE
- Klik op de Upload knop in Arduino IDE om de code naar ESP32 te uploaden

- Bekijk het resultaat: de servo motor draait langzaam van 0 naar 180° en draait daarna langzaam terug van 180 naar 0°
Code Uitleg
Lees de regel-voor-regel uitleg in de commentaarregels van de code!
Hoe de Snelheid van de Servo Motor te Beïnvloeden
Met behulp van de map() en millis() functies kunnen we de snelheid van de servo motor vloeiend regelen zonder andere code te blokkeren.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.