Arduino - Actuator met Feedback
In een eerdere tutorial hebben we geleerd over de lineaire actuator zonder feedback. In deze handleiding gaan we aan de slag met de lineaire actuator met feedback (ook wel feedback linear actuator genoemd). De feedback van de actuator geeft informatie om de positie van de slag te bepalen en vervolgens de positie te regelen. We zullen in detail leren:
- Hoe een feedback linear actuator werkt
- Hoe u de positie van een feedback linear actuator (in millimeters) kunt bepalen
- Hoe u de positie van een lineaire actuator kunt aansturen
Benodigde Hardware
Of u kunt de volgende kits kopen:
| 1 | × | DIYables STEM V3 Starterskit (Arduino inbegrepen) | |
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over de Feedback Linear Actuator
Een feedback linear actuator is een lineaire actuator met een feedbacksignaal dat de positie van de slag kan identificeren en hiermee de actuator kan aansturen. De feedback bestaat uit een potentiometer die een spanningswaarde afgeeft, evenredig aan de positie van de actuator.
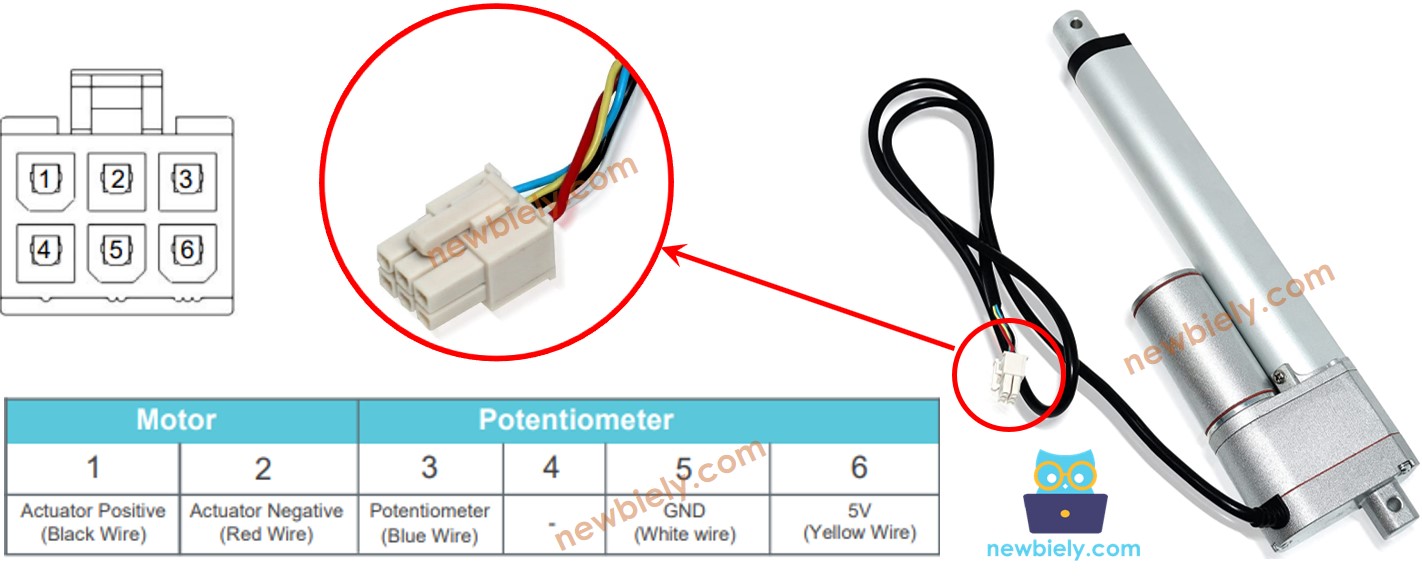
Pinout Feedback Linear Actuator
Een feedback linear actuator heeft 5 draden:
- Actuator Positief: Deze draad wordt gebruikt om de actuator aan te sturen met een hoge spanning (12V, 24V, 48V...).
- Actuator Negatief: Deze draad is de negatieve aansluiting voor de actuator. (NB: in de originele tekst lijkt een dubbele vermelding van “Actuator Positive wire”, dit is hier gecorrigeerd naar positief en negatief.)
- 5V draad: Deze draad levert 5V voor de feedback potentiometer. Verbind met 5V of 3.3V op de Arduino.
- GND draad: Deze draad is de aarde voor de feedback potentiometer. Verbind met GND op de Arduino.
- Potentiometer draad (ook wel feedback draad of output draad genoemd): Deze draad geeft een spanning af die proportioneel is aan de slagpositie.
Hoe Werkt Het
Wanneer we hoge spanning toepassen op de positieve en negatieve actuator draden, zal de actuator uitschuiven of intrekken. In detail, als we verbinden:
- 12V (12V, 24V, 48V...) op de positieve draad en GND op de negatieve draad: dan schuift de actuator met volle snelheid uit tot de begrenzing.
- 12V (12V, 24V, 48V...) op de negatieve draad en GND op de positieve draad: dan trekt de actuator met volle snelheid in tot de begrenzing.
- Tijdens het uitschuiven of intrekken, als we de voeding afzetten (GND op zowel positieve als negatieve draad), stopt de actuator met bewegen.
※ Notiz:
- De spanningswaarde om de actuator aan te sturen hangt af van de specificaties van de actuator. Raadpleeg de datasheet of handleiding voor de juiste waarden.
- De actuator kan zijn positie vasthouden zelfs nadat de voeding is gestopt, ook onder belasting.
De spanning op de potentiometerdraad is evenredig aan de slagpositie. Door deze spanning te meten kunnen we de positie van de actuator bepalen.
Bedradingsschema
Verwijder alstublieft de drie jumpers op de L298N module voordat u gaat bedraden.
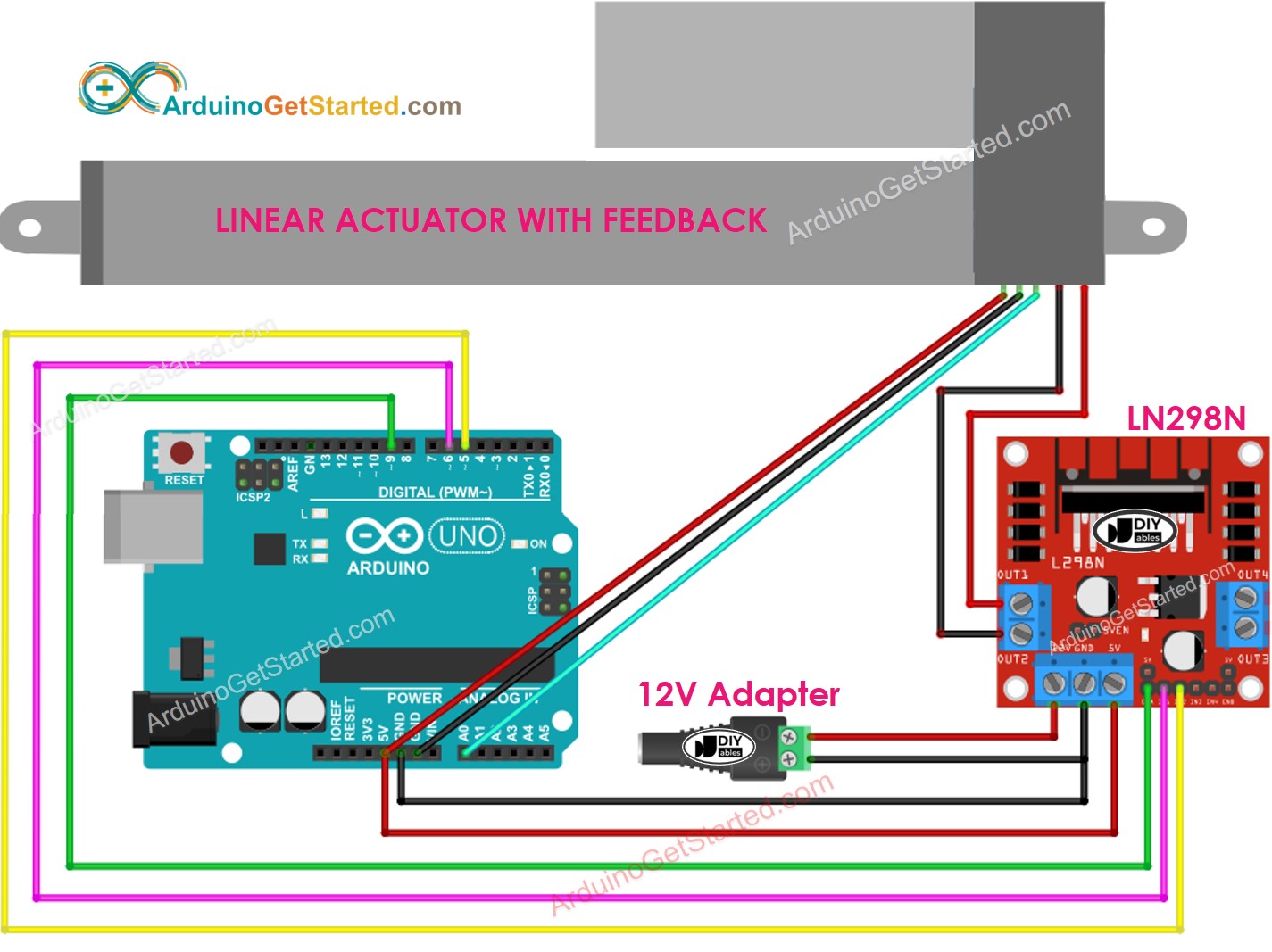
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Hoe de actuator uitschuiven/intrekken aansturen
Zie de Arduino - Actuator tutorial
Hoe de positie van de lineaire actuator bepalen
Onderstaand wordt getoond hoe u de positie van de actuator meet.
Calibratie
- Bepaal de slaglengte van de actuator (in millimeter) door te meten (met een liniaal) of uit de datasheet af te lezen.
- Bepaal de outputwaarden wanneer de actuator volledig is uitgeschoven en volledig ingetrokken door onderstaande code te draaien.
- U ziet dan de log in de Serial Monitor, bijvoorbeeld:
- Noteer deze waarden
- Als de min/max waarden omgekeerd lijken, verwissel dan IN1_PIN en IN2_PIN
Arduino code die de positie van de actuator berekent
- Vul de drie gekalibreerde waarden in de code in
- Upload de code naar de Arduino
- Bekijk het resultaat in de Serial Monitor
Hoe een lineaire actuator naar een specifieke positie aansturen
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.