Arduino - Stappenmotor en Eindschakelaar
In deze Arduino tutorial leert u hoe u Arduino, een eindschakelaar, L298N driver en een stappenmotor gebruikt. We gaan in detail behandelen:
- Hoe u een stappenmotor stopt wanneer een eindschakelaar wordt ingedrukt
- Hoe u de draairichting van een stappenmotor verandert wanneer een eindschakelaar wordt ingedrukt
- Hoe u de draairichting van een stappenmotor verandert wanneer twee eindschakelaars worden ingedrukt
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over Stappenmotor en Eindschakelaar
Als u nog niet bekend bent met de stappenmotor en eindschakelaar (pinout, werking, hoe te programmeren, etc.), bekijk dan de volgende tutorials:
- Arduino - Eindschakelaar tutorial
- Arduino - Stappenmotor aansturen tutorial
Bedradingsschema
Deze tutorial bevat Arduino code voor twee situaties: Eén stappenmotor + één eindschakelaar, en één stappenmotor + twee eindschakelaars.
- Bedradingsschema tussen de stappenmotor en één eindschakelaar
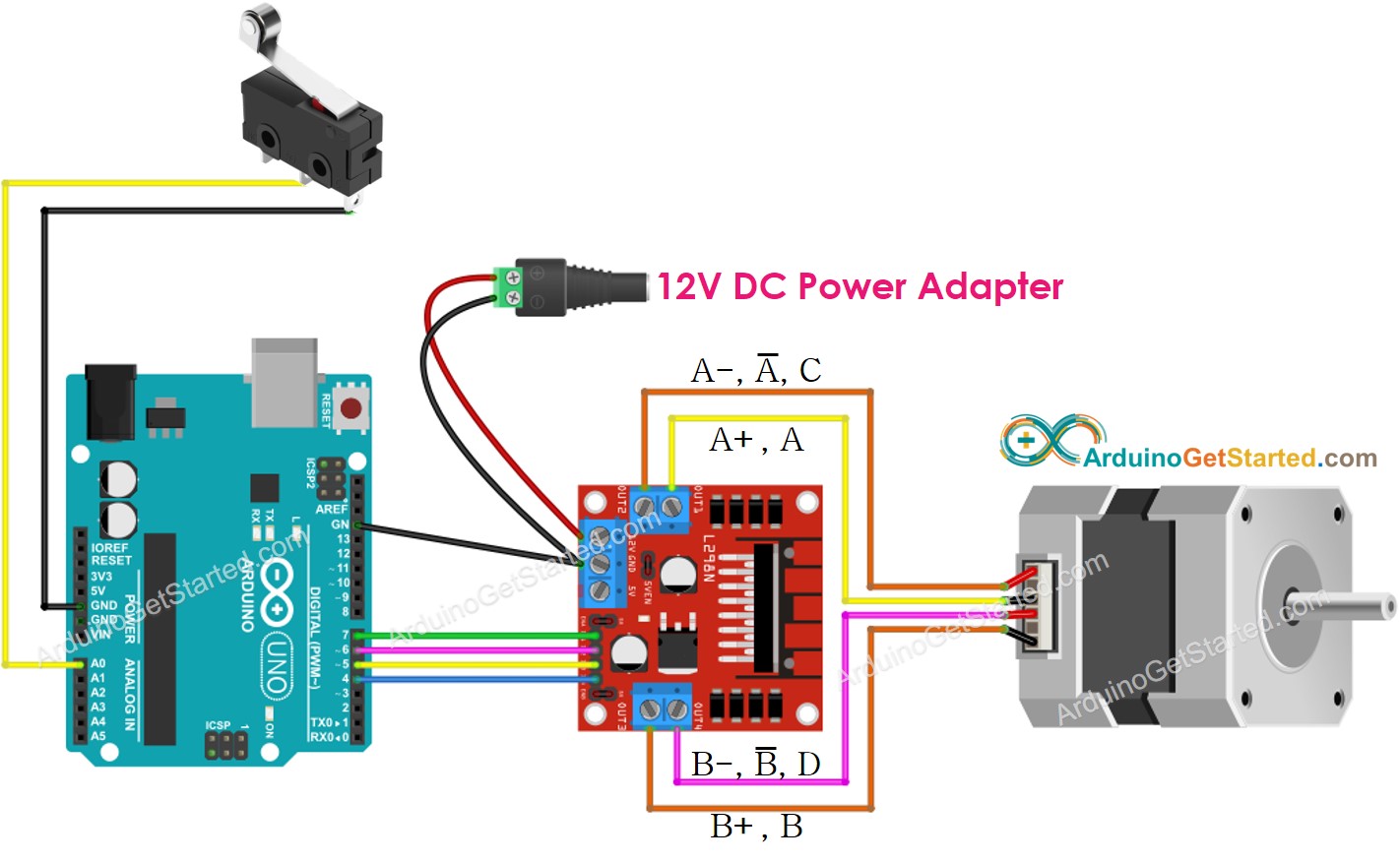
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
- Bedradingsschema tussen de stappenmotor en twee eindschakelaars
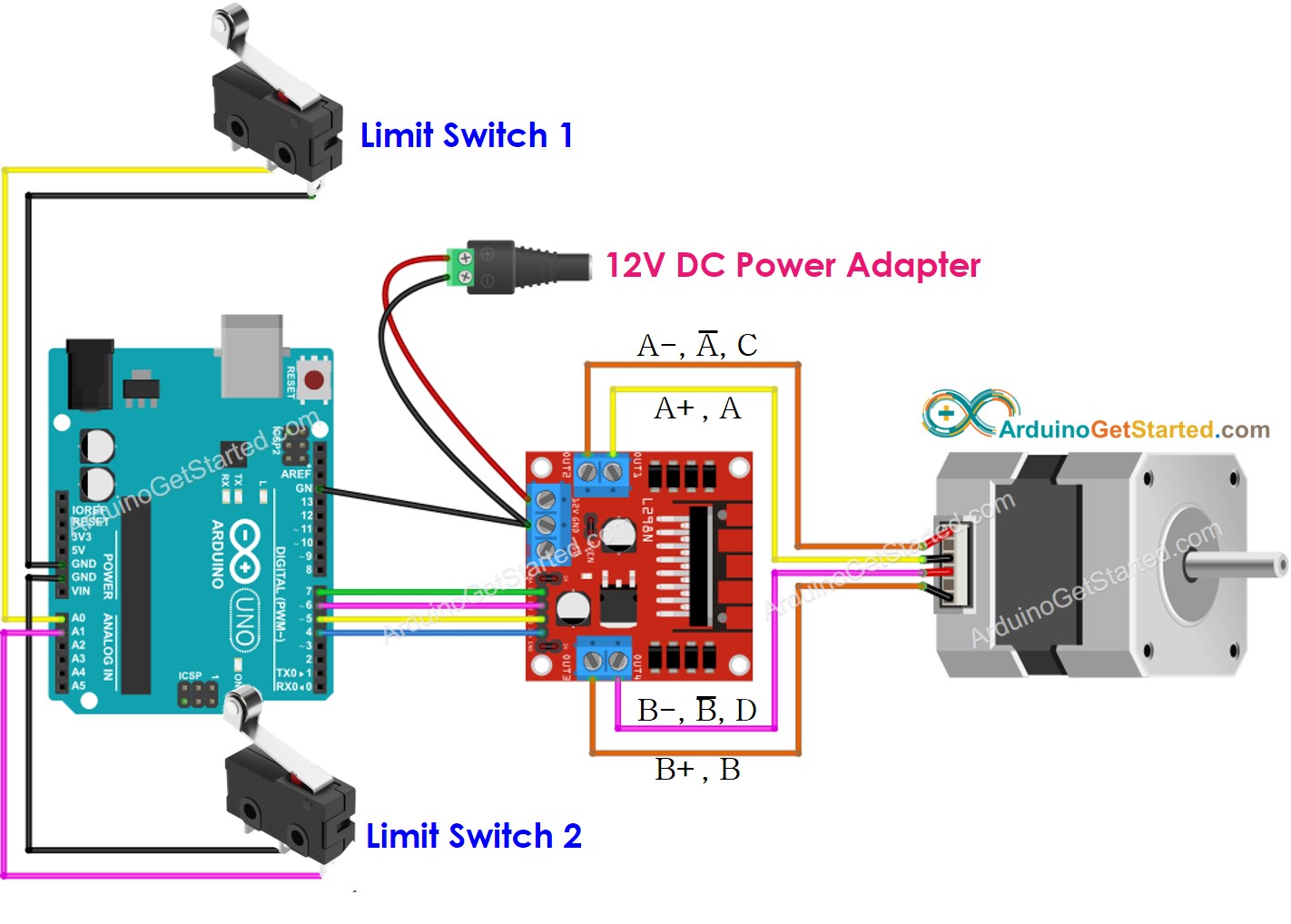
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
※ Notiz:
Afhankelijk van de stappenmotor kan de bedrading tussen de stappenmotor en L298N verschillen. Bekijk daarom deze Arduino - Stappenmotor tutorial om te zien hoe u de stappenmotor aansluit op de L298N motor driver.
Arduino Code - Stappenmotor Stoppen met een Eindschakelaar
Er zijn verschillende manieren om een stappenmotor te stoppen:
- Roep de functie stepper.stop() aan: Hiermee stopt de motor NIET direct, maar geleidelijk
- Roep NIET de functie stepper.run() aan: Hiermee stopt de motor direct
De onderstaande code laat een stappenmotor oneindig draaien en stopt deze direct bij aanraking van de eindschakelaar
Snelle Stappen
- Verbind de Arduino met de PC via de USB-kabel
- Open de Arduino IDE, selecteer het juiste bord en poort
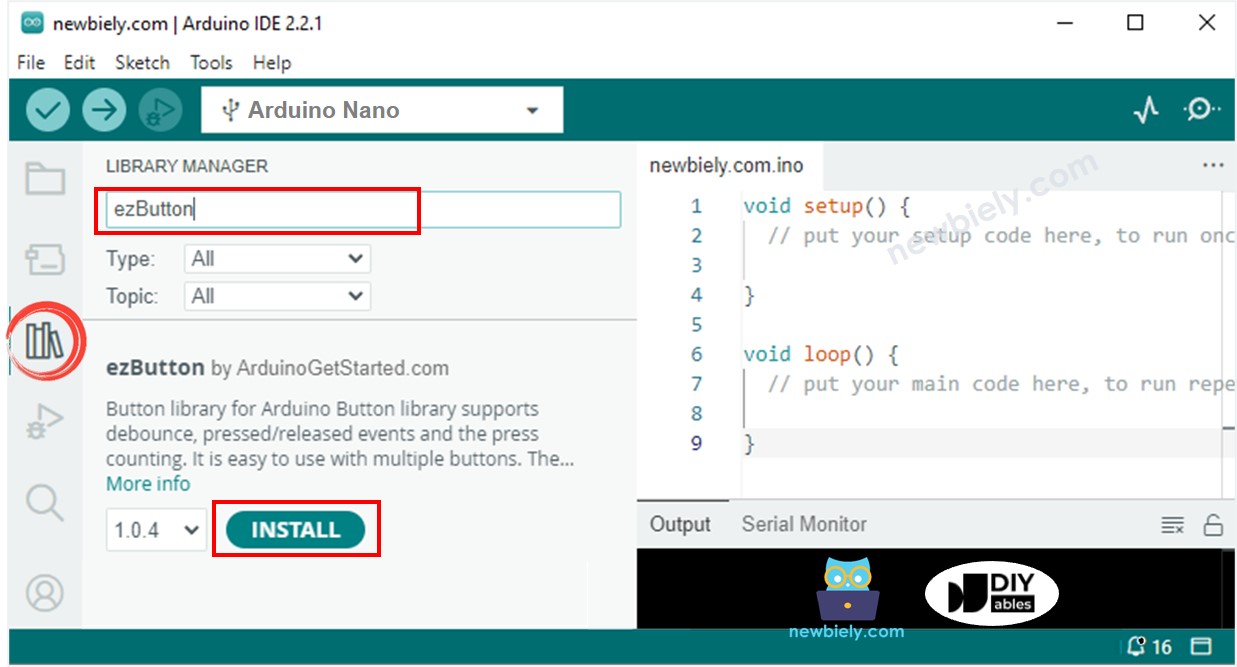
- Ga naar het Libraries icoon in de linkerzijbalk van de Arduino IDE.
- Zoek op “ezButton” en vind de button library van ArduinoGetStarted.com
- Klik op de Install knop om de ezButton library te installeren.
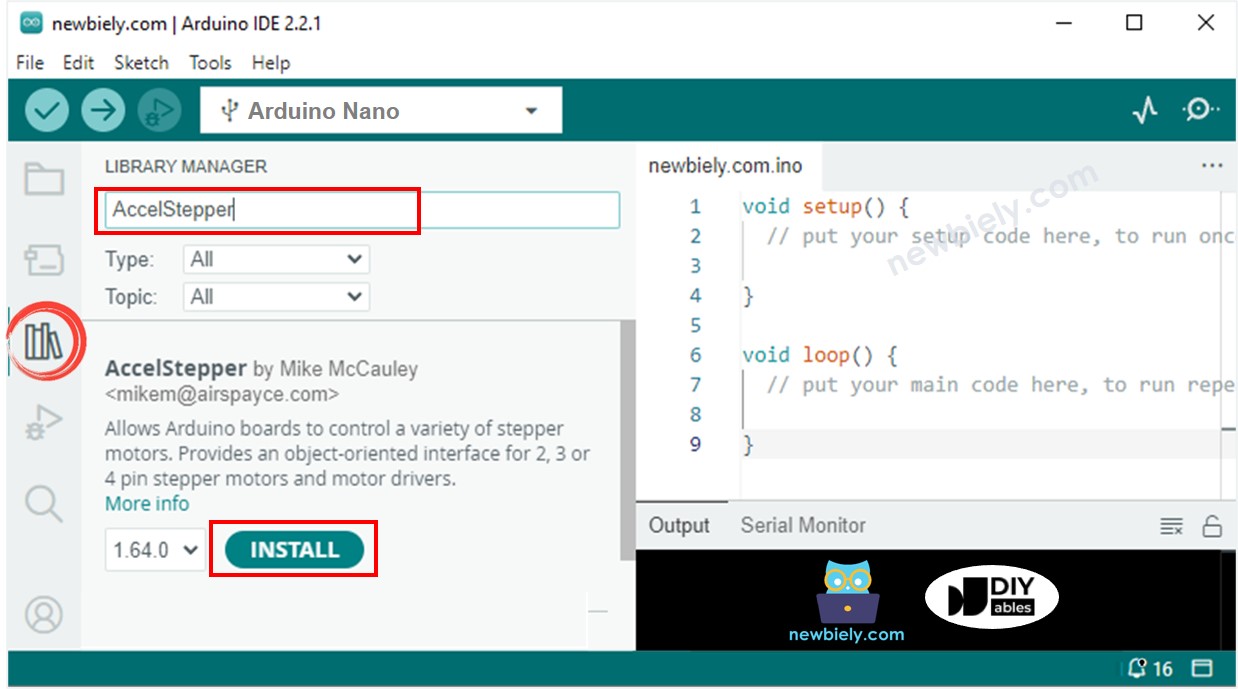
- Zoek op “AccelStepper” en vind de AccelStepper library van Mike McCauley
- Klik op de Install knop om de AccelStepper library te installeren.
- Kopieer de bovenstaande code en open deze met de Arduino IDE
- Klik op de Upload knop in de Arduino IDE om de code te uploaden naar de Arduino
- Als de bedrading correct is, ziet u dat de motor met de klok mee draait.
- Druk op de eindschakelaar
- U zult zien dat de motor onmiddellijk stopt
- Het resultaat op de Seriële Monitor ziet er als volgt uit
Code Uitleg
Lees de regel-voor-regel uitleg in de commentaarregels van de code!
Arduino Code - Draairichting van Stappenmotor Veranderen met een Eindschakelaar
De onderstaande code laat een stappenmotor oneindig draaien en verandert de draairichting zodra de eindschakelaar wordt ingedrukt
Snelle Stappen
- Kopieer de bovenstaande code en open deze met de Arduino IDE
- Klik op de Upload knop in de Arduino IDE om de code naar de Arduino te uploaden
- Als de bedrading correct is, draait de motor met de klok mee
- Druk op de eindschakelaar
- U zult zien dat de draairichting van de stappenmotor verandert naar tegen de klok in
- Druk nogmaals op de eindschakelaar
- U zult zien dat de draairichting weer verandert naar met de klok mee
- Het resultaat op de Seriële Monitor ziet er zo uit
Arduino Code - Draairichting van Stappenmotor Veranderen met Twee Eindschakelaars
De onderstaande code laat een stappenmotor oneindig draaien en verandert de draairichting zodra één van de twee eindschakelaars wordt ingedrukt
Snelle Stappen
- Kopieer de bovenstaande code en open deze met de Arduino IDE
- Klik op de Upload knop in de Arduino IDE om de code naar de Arduino te uploaden
- Als de bedrading correct is, draait de motor met de klok mee
- Druk op eindschakelaar 1
- U zult zien dat de draairichting verandert naar tegen de klok in
- Druk op eindschakelaar 2
- U zult zien dat de draairichting weer verandert naar met de klok mee
- Het resultaat op de Seriële Monitor ziet er als volgt uit
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten om deze stappenmotor met eindschakelaar opstelling succesvol te laten werken.