Arduino - Geluidsensor - Servo Motor
In deze tutorial verkennen we hoe u een geluidsensor kunt gebruiken om een servo motor aan te sturen. We duiken specifiek in twee interessante toepassingen:
- Geluidsschakelaar: Wanneer geluid wordt gedetecteerd (bijvoorbeeld een klap), draait de Arduino de servo motor naar 90 graden als deze op 0 graden staat, en terug naar 0 graden als deze op 90 graden staat.
- Geluid-geactiveerde relais: Bij het detecteren van geluid draait de Arduino de servo motor gedurende een bepaalde tijd naar 90 graden, en daarna weer terug naar 0 graden.
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor en Geluidsensor
Als u nog niet bekend bent met servo motoren en geluidsensoren (pinout, werking, programmeren ...), leer er dan meer over in de volgende tutorials:
Aansluitschema
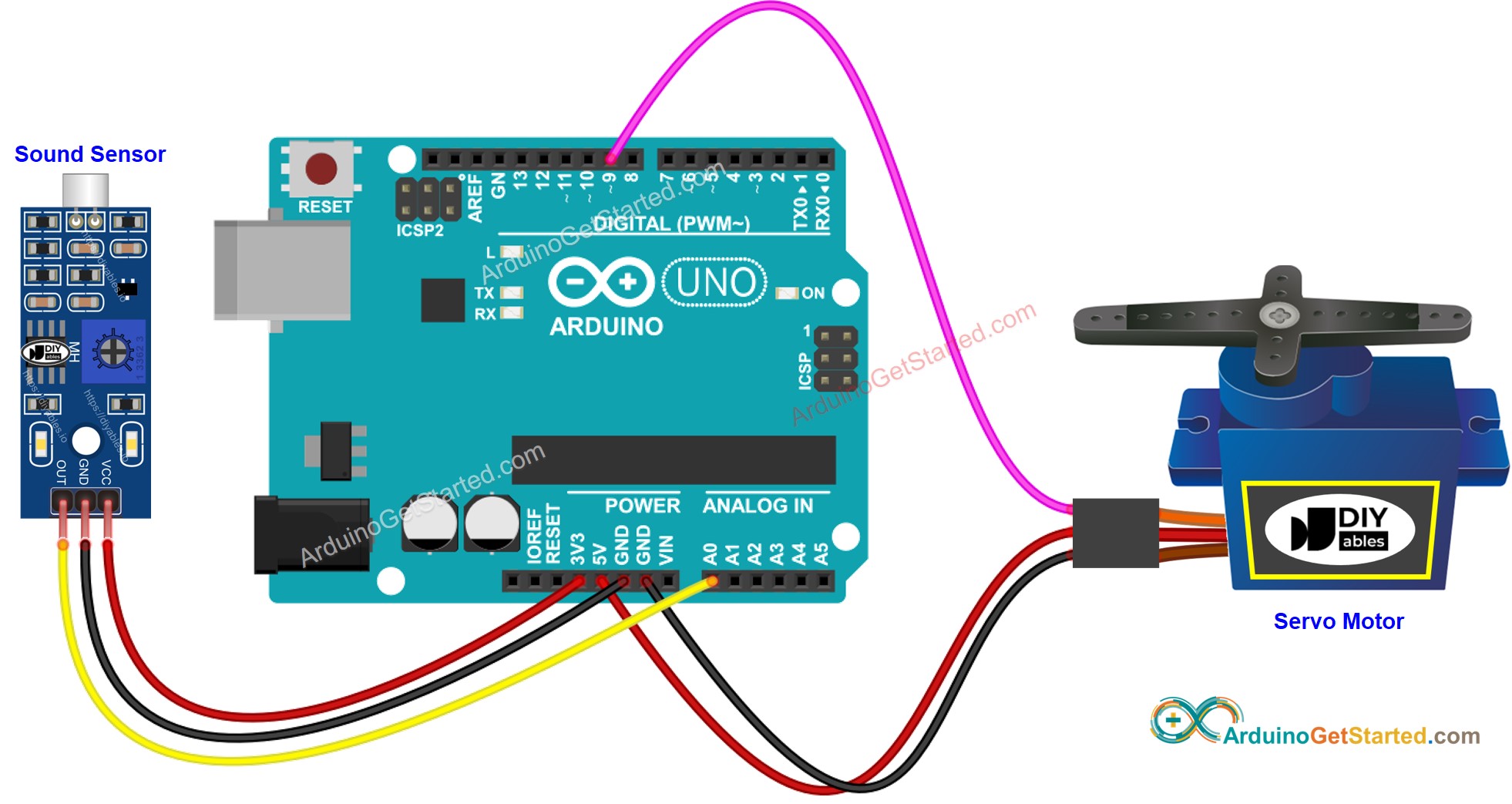
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Arduino Code - Geluidsschakelaar wisselt hoek van Servo Motor
De onderstaande code wisselt de hoek van de servo motor tussen 0 en 90 graden telkens wanneer geluid wordt gedetecteerd.
Snel aan de slag
- Verbind de Arduino met de PC via de USB-kabel
- Open de Arduino IDE en selecteer het juiste board en de juiste poort
- Kopieer de bovenstaande code en open deze in de Arduino IDE
- Klik op de Upload knop in de Arduino IDE om de code naar de Arduino te uploaden
- Klap met uw handen vlak voor de geluidsensor
- Observeer de beweging van de servo motor
Arduino Code - Geluid-geactiveerde Servo Motor voor een bepaalde tijd
De onderstaande code draait de servo motor naar 90 graden gedurende een bepaalde tijd zodra geluid wordt gedetecteerd. Na deze tijd roteert de servo motor terug naar 0 graden.
Let op: de bovenstaande code maakt gebruik van de delay()-functie voor eenvoud. Echter, als u extra code toevoegt, kan de uitvoering tijdens de delay-tijd geblokkeerd worden. Om dit te voorkomen, gebruikt de volgende code een niet-blokkerende methode via de millis()-functie in plaats van delay om blokkering te voorkomen.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten en helpt u stap voor stap.