Arduino - Servo Motor
In deze handleiding leert u hoe u een servo motor gebruikt met Arduino. We behandelen in detail:
- Hoe een servo motor werkt
- Hoe u Arduino programmeert om een servo motor te besturen
- Hoe u de snelheid van een servo motor controleert via Arduino
- Hoe u extra stroom levert voor servo motoren met hoog koppel
Hardware Benodigd
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over Servo Motor
De servo motor is een component die zijn as (meestal tussen 0° en 180°) kan draaien. Deze wordt gebruikt om de hoekpositie van een object nauwkeurig te regelen.
Pinout
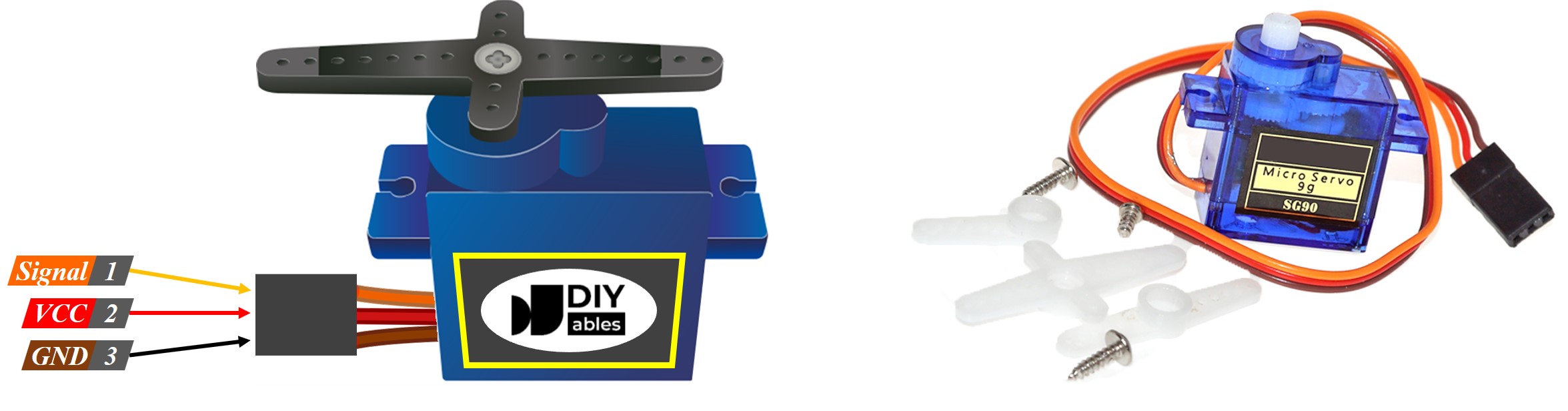
De servo motor die in dit voorbeeld wordt gebruikt, heeft drie pinnen:
- VCC-pin: (meestal rood) moet verbonden worden met VCC (5V)
- GND-pin: (meestal zwart of bruin) moet verbonden worden met GND (0V)
- Signaalpin: (meestal geel of oranje) ontvangt het PWM-besturingssignaal van een Arduino-pin.
Hoe Het Werkt
Nadat de VCC en GND pinnen respectievelijk op 5V en 0V zijn aangesloten, kunnen we de servo motor besturen door een juiste PWM-signaal op de signaalpin te genereren.
De hoek wordt bepaald door de breedte van het PWM-signaal.
De datasheet van de servo motor geeft de volgende parameters aan:
- Periode van PWM (PERIOD)
- Minimale pulsbreedte (WIDTH_MIN)
- Maximale pulsbreedte (WIDTH_MAX)
Deze parameters zijn vastgelegd in de Arduino Servo-bibliotheek. U hoeft de waarden van deze parameters niet te kennen.
De hoek wordt bepaald als volgt:
- Als de pulsbreedte van PWM = WIDTH_MIN, draait de servo motor naar 0°.
- Als de pulsbreedte van PWM = WIDTH_MAX, draait de servo motor naar 180°.
- Als de pulsbreedte tussen WIDTH_MIN en WIDTH_MAX ligt, draait de servo motor proportioneel naar een hoek tussen 0° en 180°.
Arduino - Servo Motor
Sommige Arduino-pinnen kunnen geprogrammeerd worden om een PWM-signaal te genereren. Door de signaalpin van de servo te verbinden met een Arduino-pin en daar een PWM-signaal op te genereren, kan de servo motor worden bestuurd.
Dankzij de Arduino Servo bibliotheek is het besturen van een servo motor heel eenvoudig. U hoeft zelfs niet te weten hoe een servo motor precies werkt, noch hoe u PWM moet genereren. U hoeft alleen te leren hoe u de bibliotheek gebruikt.
Bedradingsschema
U komt misschien bedradingsschema’s tegen waarin de VCC-pin van een servo motor direct verbonden wordt met de 5V-pin van de Arduino, zoals hieronder getoond. Hoewel dit soms werkt, wordt het sterk afgeraden omdat het risico bestaat uw Arduino te beschadigen.
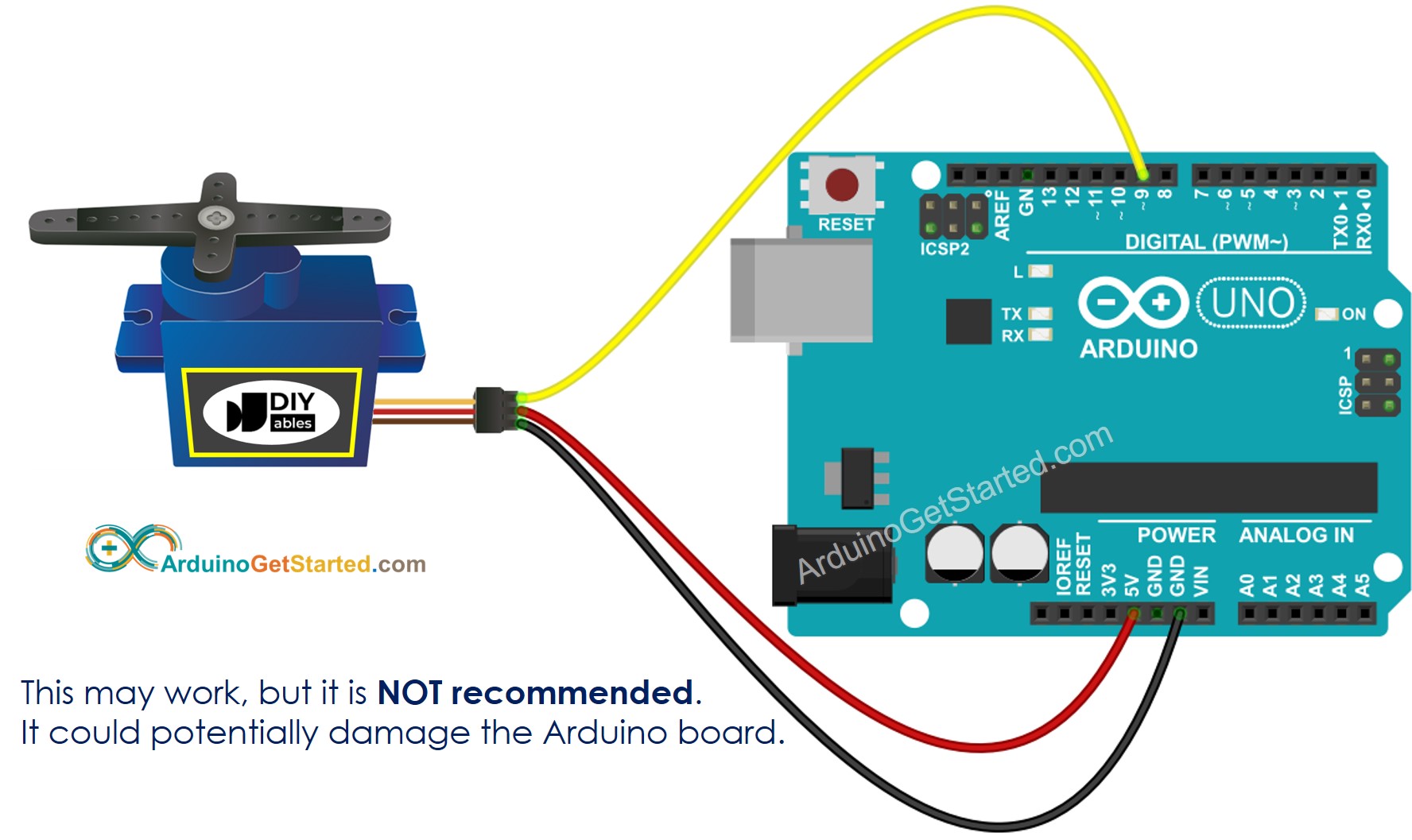
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Om uw Arduino te beschermen raden wij aan een externe voeding te gebruiken voor de servo motor. Onderstaand bedradingsschema laat zien hoe u de servo motor kunt aansluiten op een externe voeding.
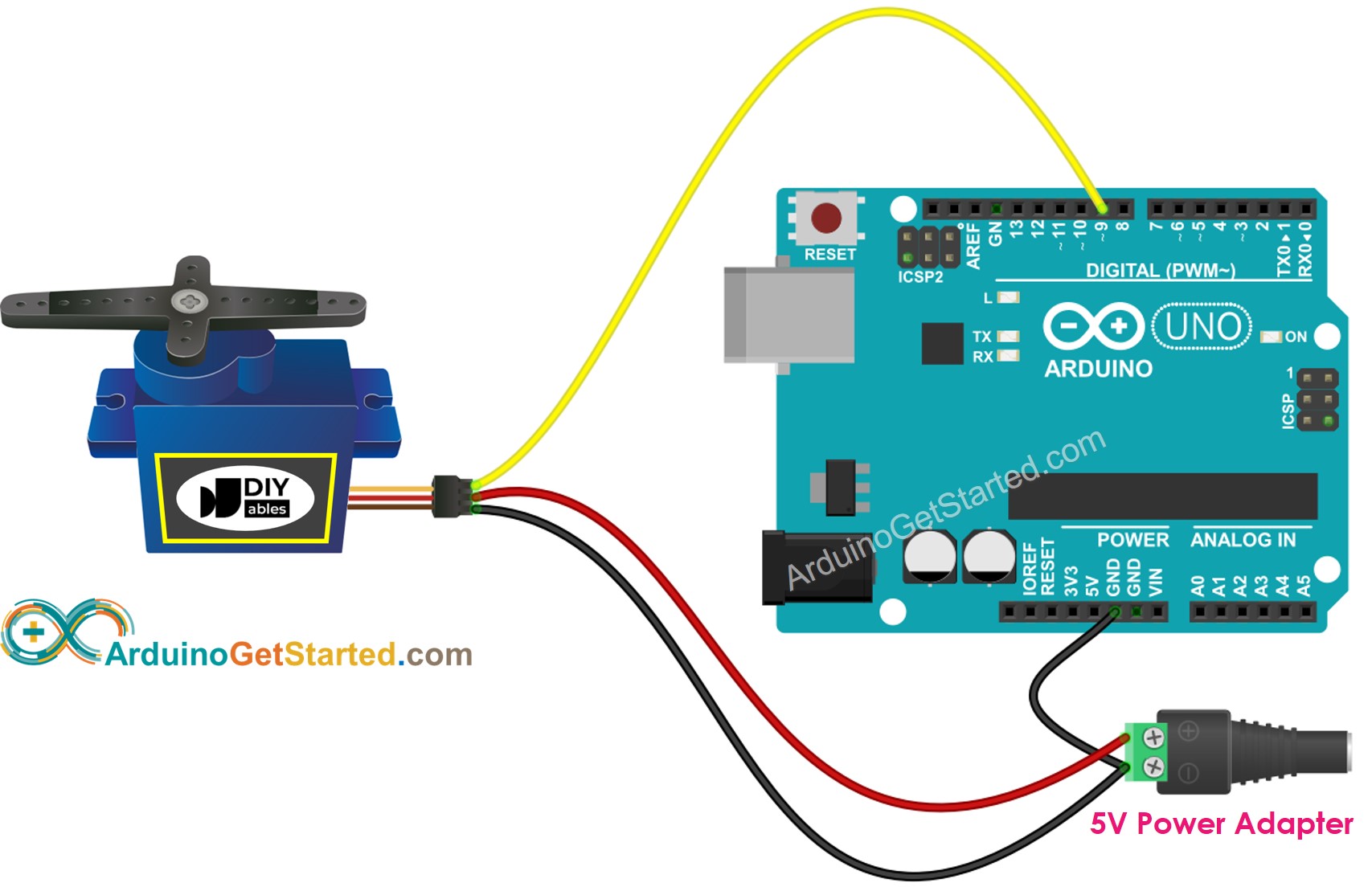
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Zorg ervoor dat u de GND van de externe voeding verbindt met de GND van de Arduino. Dit is een cruciale stap voor een correcte werking.
Hoe Programmeert U Voor Servo Motor
- Voeg de bibliotheek toe:
- Declareer een Servo-object:
Wilt u meer servo motoren besturen, declareer dan meerdere Servo-objecten:
- Stel de control pin in van de Arduino die verbonden is met de signaalpin van de servo motor. Bijvoorbeeld pin 9:
- Tenslotte, draai de servo motor naar de gewenste hoek. Bijvoorbeeld 90°:
Arduino Code
Snelle Stappen
- Verbind Arduino met PC via USB-kabel
- Open de Arduino IDE, selecteer het juiste board en poort
- Kopieer de bovenstaande code en open deze met de Arduino IDE
- Klik op de Upload knop in de Arduino IDE om de code naar Arduino te sturen

- Zie het resultaat: De servo motor draait langzaam van 0 naar 180° en daarna weer langzaam terug naar 0°
Code Uitleg
Lees de regel-voor-regel uitleg in de commentaar regels van de code!
Hoe De Snelheid Van De Servo Motor Te Controleren
Met behulp van de functies map() en millis() kunnen we de snelheid van de servo motor soepel en niet-blokkerend regelen.
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Daag uzelf uit
Gebruik de servo motor voor een van de volgende projecten:
- De positie van een servo motor besturen met een potentiometer. Tip: Zie Arduino - Potentiometer.
- Het automatisch openen/sluiten van een vuilnisbak. Tip: Zie Arduino - Ultrasonic Sensor.
Aanvullende Kennis
- De Servo bibliotheek ondersteunt tot 12 motoren op Arduino UNO en 48 op de Arduino Mega.
- De voeding vanuit de 5V pin van Arduino is mogelijk NIET voldoende voor servo motoren in de volgende gevallen:
- Het gebruik van een servo motor met hoog koppel die een zware last kan dragen.
- Het gebruik van meerdere servo motoren.
- Verbind de positieve aansluiting van de extra voeding NIET met de 5V pin van Arduino.
- Verbind altijd de negatieve aansluiting van de extra voeding met de GND pin van Arduino.
In deze gevallen is het aanbevolen een extra stroomvoorziening te gebruiken voor de servo motoren.
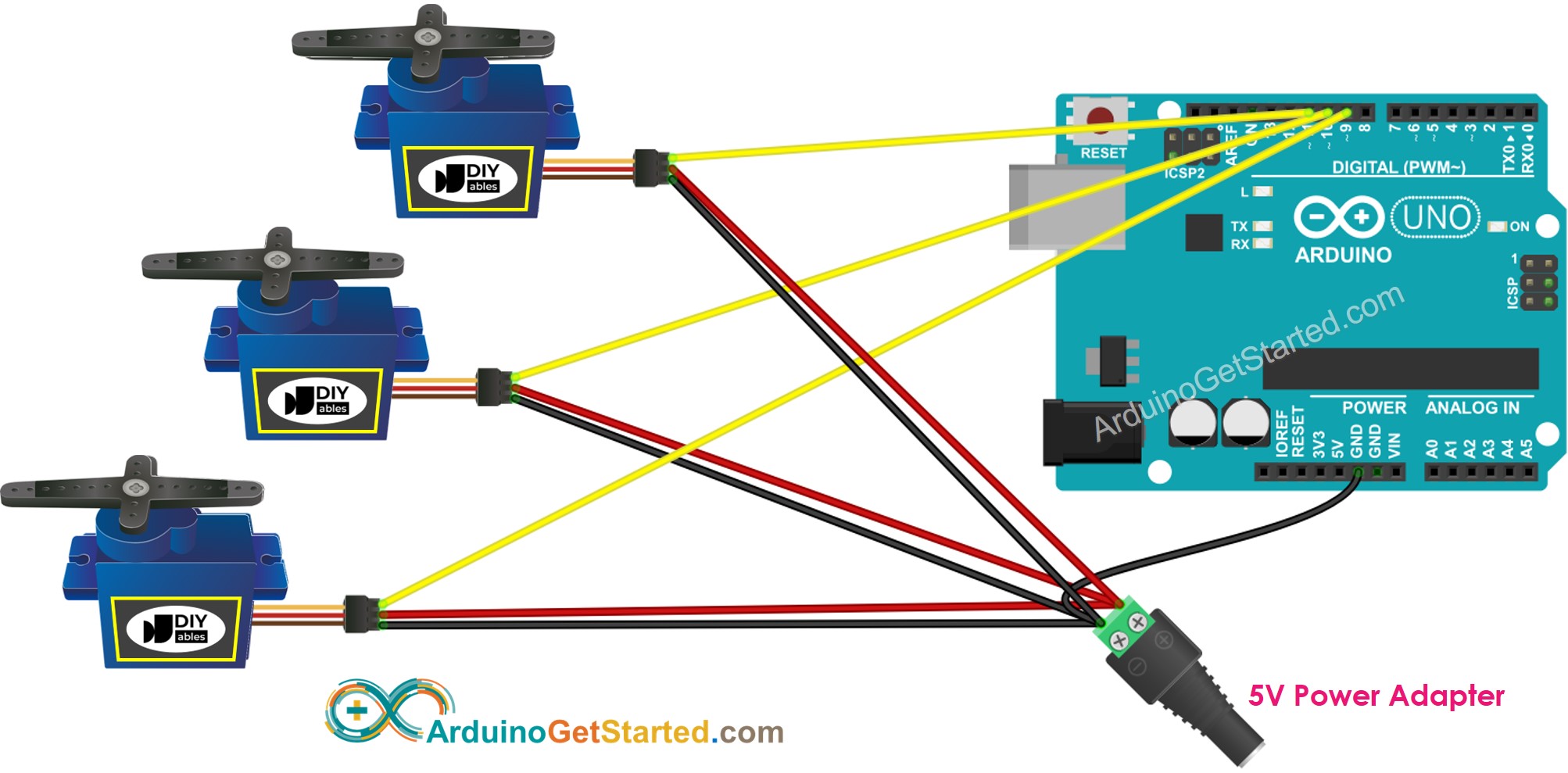
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Zoals u ziet in bovenstaand schema, is de VCC pin van de servo motor NIET verbonden met de 5V pin van de Arduino, maar met de positieve aansluiting van een extra stroombron.
Let op: