Arduino - Rotary Encoder
In deze tutorial gaan we leren hoe u een incremental encoder gebruikt met Arduino. In detail behandelen we:
- Hoe een rotary encoder werkt
- Rotary encoder versus potentiometer
- Hoe u de rotary encoder aansluit op een Arduino
- Hoe u Arduino programmeert om de draairichting en positie van de rotary encoder TE LEZEN ZONDER interrupt
- Hoe u Arduino programmeert om de draairichting en positie van de rotary encoder TE LEZEN MET interrupt
Hardware Benodigdheden
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Over de Rotary Encoder
Een rotary encoder is een elektromechanisch apparaat dat rotatiebeweging omzet in een elektrisch signaal. Het meet de rotatie en positie van een as of knop. Er zijn twee hoofdtypen:
- Incremental encoder: genereert pulsen om relatieve verandering te meten
- Absolute encoder: geeft een unieke digitale code voor elke positie, ideaal voor precieze positiebepaling ook na een stroomuitval.
Deze handleiding gaat over de incremental encoder.
Rotary Encoder Module Pinout

Een rotary encoder module heeft 4 pinnen:
- CLK-pin (Output A): dit is de hoofd puls die aangeeft hoeveel rotatie heeft plaatsgevonden. Elke keer dat u de knop een stapje (klik) draait in welke richting dan ook, geeft de CLK pin een signaal dat één volledige cyclus voltooit (LOW → HIGH → LOW).
- DT-pin (Output B): werkt vergelijkbaar met de CLK pin, maar het signaal loopt 90 graden achter op het CLK-signaal. Dit helpt ons de draairichting te bepalen (met of tegen de klok in).
- SW-pin: dit is de uitgang van de drukknop binnenin de encoder. Dit is normaal open. Als u een pull-up weerstand op deze pin toepast, is de SW pin HIGH als de knop niet wordt ingedrukt, en LOW als de knop wordt ingedrukt.
- VCC-pin (+): moet verbonden zijn met VCC (tussen 3.3 en 5 Volt)
- GND-pin: moet verbonden zijn met GND (0V)
Rotary Encoder versus Potentiometer
U kunt de rotary encoder verwarren met de potentiometer, maar het zijn verschillende componenten. Hieronder een vergelijking:
- Rotary encoder is als een moderne versie van de potentiometer, maar met meer mogelijkheden.
- Rotary encoder kan oneindig rondgedraaid worden, terwijl een potentiometer ongeveer driekwart van een cirkel draait.
- Rotary encoder geeft pulsen als uitgang, een potentiometer geeft een analoge spanning.
- Rotary encoder is handig als u alleen wilt weten hoeveel de knop is verzet, niet de exacte positie. Potentiometer is geschikt wanneer u de precieze positie wilt weten.
Hoe Werkt een Rotary Encoder
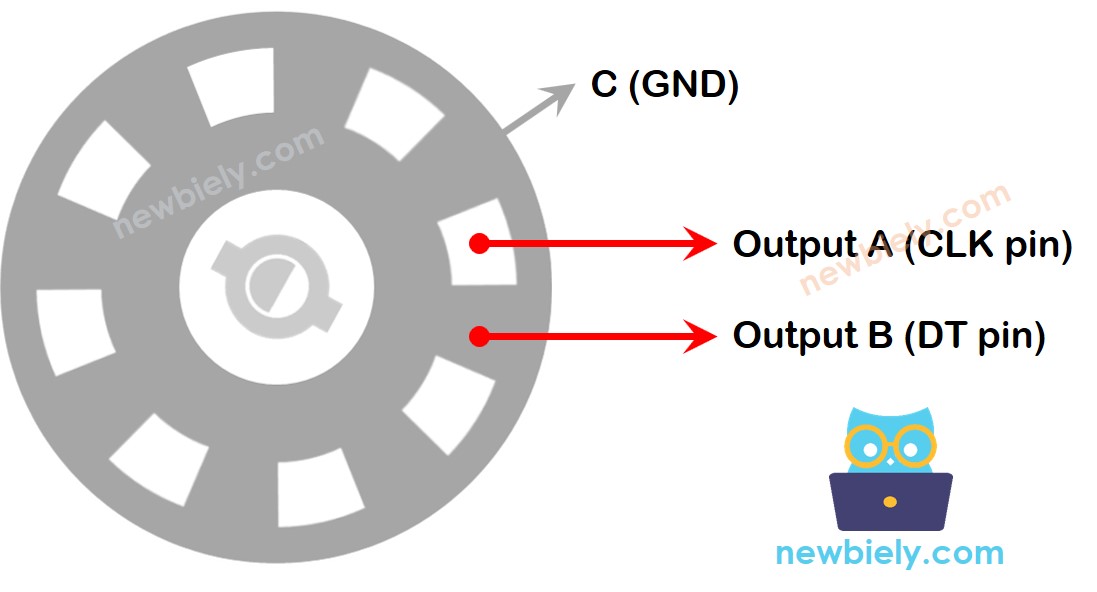
Binnenin de encoder zit een schijf met gleuven verbonden aan een pin genaamd C, die fungeert als gedeelde aarde (common ground). Daarnaast zijn er twee pinnen A en B.
- Als u aan de knop draait, maken pinnen A en B afwisselend contact met de gedeelde aarde pin C, in een bepaalde volgorde afhankelijk van de draaigrichting (met of tegen de klok in).
- Deze contacten creëren twee signalen die in tijd net iets verschillen doordat de pinnen niet gelijktijdig de aarde raken. Deze twee signalen lopen 90 graden uit fase op elkaar. Dit heet quadratuur encoding.
- Draait u de knop met de klok mee, dan raakt pin A eerst de aarde voordat pin B deze raakt. Draait u tegen de klok in, dan raakt pin B eerst de aarde voordat pin A dat doet.
- Door te controleren wanneer iedere pin de aarde raakt of loslaat, kunnen we bepalen welke kant de knop draait. We doen dit door te kijken wat er met pin B gebeurt als pin A verandert van toestand.
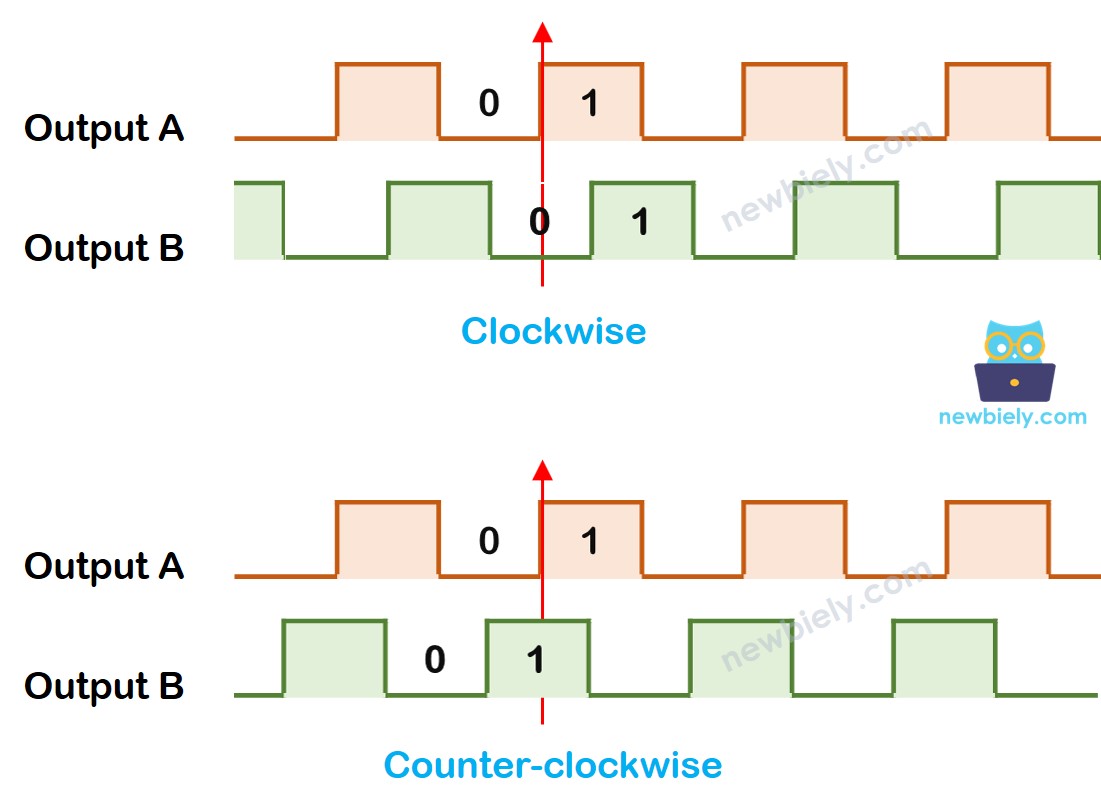
Wanneer pin A verandert van LOW naar HIGH:
- Als B LOW is, dan draait de knop met de klok mee.
- Als B HIGH is, dan draait de knop tegen de klok in.
※ Notiz:
Pin A en B zijn verbonden met de CLK en DT pinnen. Afhankelijk van de fabrikant kan de volgorde verschillen. De onderstaande code is getest met de rotary encoder van DIYables.
Hoe Arduino te Programmeren voor Rotary Encoder
- Controleer het signaal van de CLK pin
- Als de toestand verandert van LOW naar HIGH, controleer dan de toestand van de DT pin:
- Als de DT pin HIGH is, draait de knop tegen de klok in, verhoog de teller met 1
- Als de DT pin LOW is, draait de knop met de klok mee, verlaag de teller met 1
Bedradingsschema
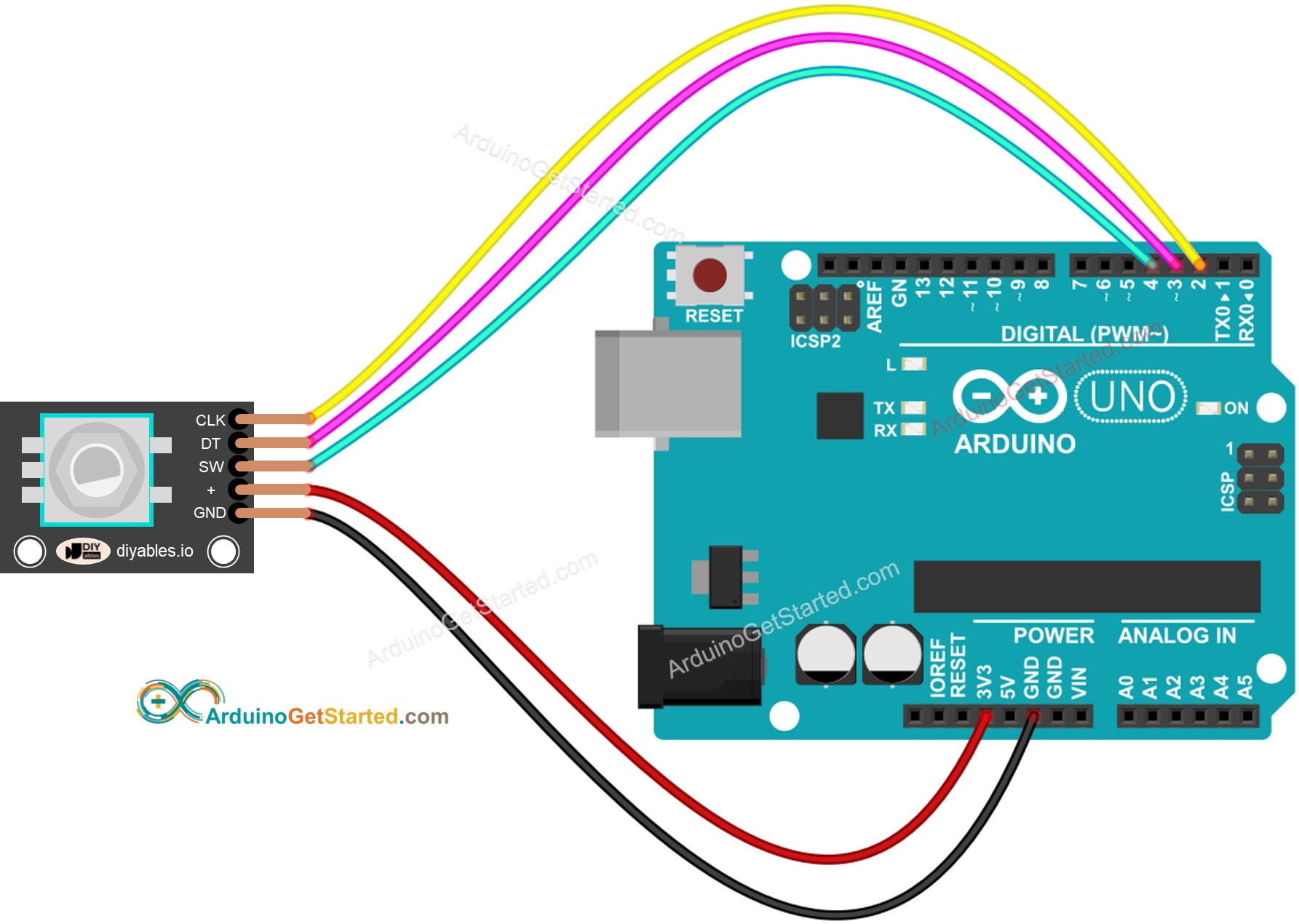
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
Arduino Code – Rotary Encoder zonder Interrupt
De onderstaande Arduino code doet het volgende:
- Detecteert de draairichting en hoeveelheid rotatie van de encoder.
- Als er wordt gedetecteerd dat de knop een „klik” met de klok mee draait, verhoog dan de teller met één.
- Als er wordt gedetecteerd dat de knop een „klik” tegen de klok in draait, verlaag dan de teller met één.
- Detecteert of de knop wordt ingedrukt.
Om de code te vereenvoudigen voor het ontbouncen van de knop, wordt de ezButton bibliotheek gebruikt.
Snelstartstappen
- Installeer de ezButton bibliotheek in Arduino IDE. Zie Hoe te installeren
- Kopieer de bovenstaande code en open deze met Arduino IDE
- Klik op de Upload knop in Arduino IDE om de code naar de Arduino te uploaden
- Draai de knop met de klok mee en daarna tegen de klok in
- Druk op de knop
- Bekijk het resultaat op de Serial Monitor.
Code Uitleg
Bekijk de regel-voor-regel opmerkingen in de code voor verdere uitleg.
Arduino Code – Rotary Encoder met Interrupt
In het vorige codevoorbeeld gebruiken we de polling methode, waarbij continu de pinstatus wordt gecontroleerd. Dit heeft twee nadelen:
- Het verbruikt onnodig Arduino bronnen
- Sommige tellers kunnen gemist worden als andere code lang duurt om uit te voeren
Een oplossing hiervoor is het gebruik van interrupts. Interrupts maken continue controle overbodig omdat ze het programma onderbreken zodra een gebeurtenis plaatsvindt. Hierdoor kan de Arduino andere taken uitvoeren zonder events te missen.
Hier volgt een voorbeeld hoe u een rotary encoder leest met interrupts.
Als u nu aan de knop draait, ziet u vergelijkbare informatie verschijnen in de Serial Monitor als in de vorige code.
※ Notiz:
- Als u interrupts gebruikt, moet u de CLK pin van de encoder aansluiten op een Arduino pin die interrupts ondersteunt. Niet alle Arduino pinnen kunnen dit. Bijvoorbeeld, op de Arduino Uno zijn alleen pin 2 en pin 3 geschikt voor interrupts.
- U zult soms tutorials tegenkomen die twee interrupts gebruiken voor één encoder, maar dat is onnodig en verspilling. Eén interrupt is voldoende.
- Het is belangrijk om de volatile keyword te gebruiken voor globale variabelen binnen de interruptroutine. Zonder dit kunnen onvoorziene problemen ontstaan.
- Houd de code binnen de interruptroutine zo eenvoudig mogelijk. Vermijd het gebruik van Serial.print() of Serial.println() in de interrupt.
Arduino Rotary Encoder Toepassingen
Met een Rotary Encoder kunt u de volgende toepassingen (maar niet beperkt tot) realiseren:
- Arduino - Rotary Encoder bestuurt positie van een servo motor
- Arduino - Rotary Encoder bestuurt helderheid van een LED
- Arduino - Rotary Encoder bestuurt snelheid van een stappenmotor
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten die de instructies aanvullen en verduidelijken.