Arduino - RFID/NFC - Servo Motor
In deze tutorial leert u hoe u een RFID/NFC-tag gebruikt om een servo motor met Arduino aan te sturen. Het werkt als volgt:
- Wanneer een geautoriseerde tag wordt aangeraakt, draait de Arduino de servo motor naar 90°
- Wanneer dezelfde geautoriseerde tag opnieuw wordt aangeraakt, draait de Arduino de servo motor terug naar 0°
- Dit proces wordt oneindig herhaald
Deze toepassing is bijvoorbeeld bruikbaar voor het vergrendelen/ontgrendelen van een kast, lade, deur of het openen/sluiten van een voederautomaat voor huisdieren...
Hardware Vereist
Of u kunt de volgende kits kopen:
| 1 | × | DIYables Sensorkit (30 sensoren/displays) | |
| 1 | × | DIYables Sensorkit (18 sensoren/displays) |
Aankoopadvies: Als u meerdere servomotoren gebruikt, raden we aan de PCA9685 16 Channel PWM Servo Driver Module te gebruiken om MCU-pinnen te besparen en de bedrading te vereenvoudigen.
Over RFID/NFC RC522 Module en Servo Motor
Als u nog niet bekend bent met de RFID/NFC RC522 Module en Servo Motor (pinout, werking, programmering...), raadpleeg dan de volgende tutorials:
- Arduino - RFID/NFC RC522 tutorial
- Arduino - Servo Motor tutorial

Hoe Het Werkt
- De UIDs van een aantal RFID/NFC-tags zijn vooraf ingesteld in de Arduino-code
- De gebruiker tikt een RFID/NFC-tag op de RFID/NFC-lezer
- De lezer leest de UID van de tag
- De Arduino ontvangt de UID van de lezer
- De Arduino vergelijkt de gelezen UID met de vooraf gedefinieerde UIDs
- Als de UID overeenkomt met een van de gedefinieerde UIDs, bestuurt Arduino de servo motor naar 90°
- Als de tag nogmaals wordt aangeraakt, bestuurt Arduino de servo motor terug naar 0°
- Dit proces wordt oneindig herhaald
Bedradingsschema
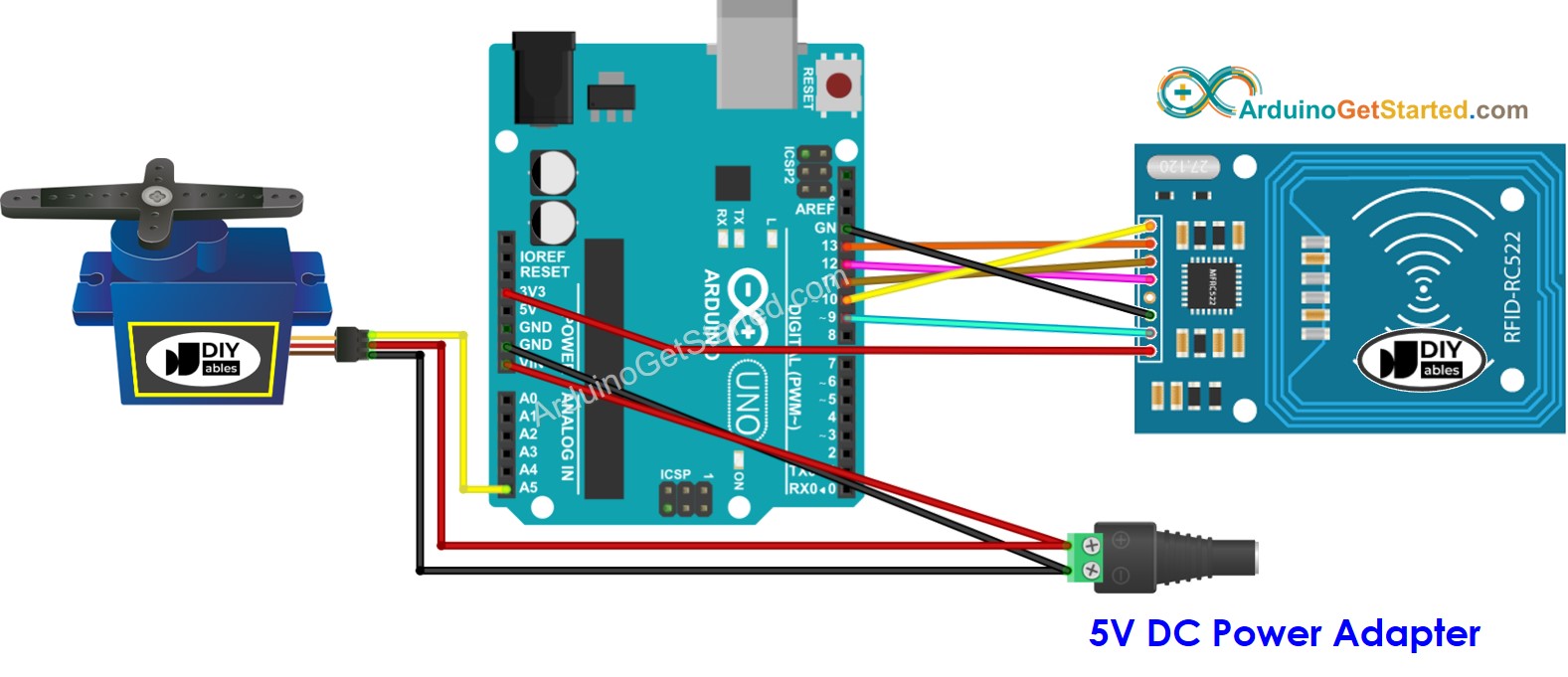
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
In het bovenstaande bedradingsschema wordt een enkele 5V-adapter gebruikt om direct voeding te leveren aan de Arduino, rechtstreeks aan de servo motor en de RC522-module (indirect via de 3.3V-pin van de Arduino).
Om het proces te vereenvoudigen zijn de pinnen van de RC522-module direct verbonden met de Arduino-pinnen. Dit kan echter ervoor zorgen dat de Arduino in bepaalde gevallen niet correct werkt, omdat de outputpinnen van de Arduino een spanning van 5V leveren, terwijl de pinnen van de RC522-module normaal werken op een spanning van 3.3V. Daarom is het verstandig om de spanning tussen de Arduino-pinnen en de RC522-module te regelen. Raadpleeg voor meer details de Arduino - RFID RC522 tutorial. Hieronder ziet u een voorbeeld hoe u 5V kunt terugbrengen naar 3.3V met weerstanden:
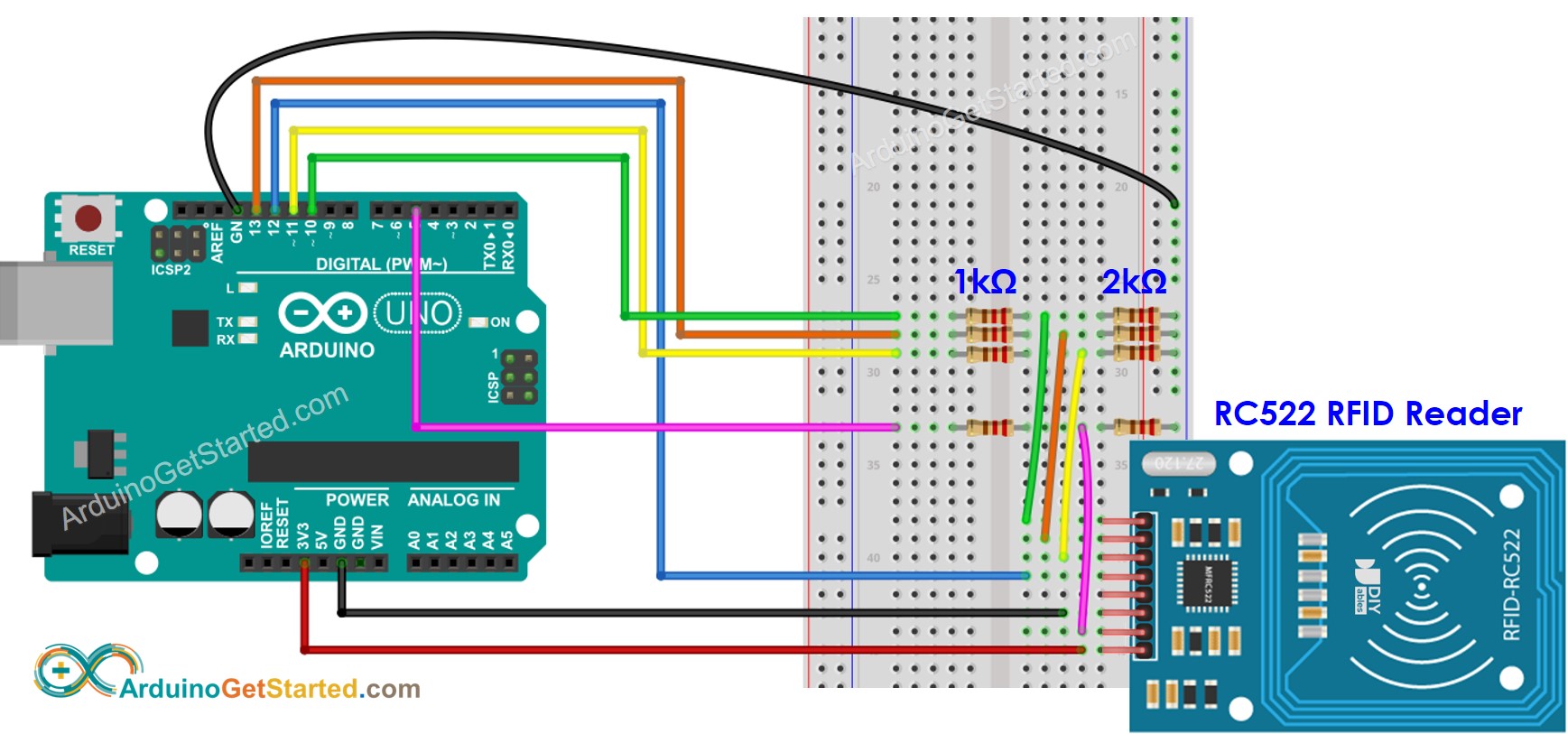
Deze afbeelding is gemaakt met Fritzing. Klik om de afbeelding te vergroten.
※ Notiz:
De volgorde van de pinnen kan verschillen per fabrikant. Gebruik ALTIJD de op het module afgedrukte labels. De bovenstaande afbeelding toont de pinout van modules van fabrikant DIYables.
Bedradingsschema RFID/NFC RC522 Module
| RFID/NFC RC522 | Arduino |
|---|---|
| SS | → 10 |
| SCK | → 13 |
| MOSI | → 11 |
| MISO | → 12 |
| IRQ (niet verbonden) | |
| GND | → GND |
| RST | → 9 |
| VCC | → 3.3V |
Bedradingsschema Servo Motor
| Servo Motor | Arduino | 5V DC Adapter |
|---|---|---|
| VCC (rood) | → positieve pool | |
| GND (bruin) | → negatieve pool | |
| SIG (geel) | → A5 |
Bedradingsschema 5V DC Voedingsadapter
| 5V DC Adapter | Servo Motor | Arduino |
|---|---|---|
| Positief | → VCC | |
| Positief | → Vin | |
| Negatief | → GND | |
| Negatief | → GND |
Arduino Code – Enkele RFID/NFC Tag
Snelle Stappen
- Ga naar het Libraries-icoon in de linkerzijbalk van de Arduino IDE.
- Zoek naar “MFRC522” en vind de library van GithubCommunity
- Klik op de Installeren-knop om de MFRC522-library te installeren.

Omdat de UID meestal niet op de RFID/NFC-tag gedrukt staat, is de eerste stap om de UID van de tag te achterhalen. Dit doet u als volgt:
- Kopieer bovenstaande code en open deze met de Arduino IDE
- Klik op de Upload-knop in de Arduino IDE om de code naar de Arduino te uploaden
- Open de Seriële Monitor
- Tik een RFID/NFC-tag op de RFID-RC522-module
- Noteer de UID in de Seriële Monitor
Na het verkrijgen van de UID:
- Werk de UID bij in regel 20 van de bovenstaande code. Bijvoorbeeld, wijzig byte authorizedUID[4] = {0xFF, 0xFF, 0xFF, 0xFF}; naar byte authorizedUID[4] = {0x3A, 0xC9, 0x6A, 0xCB};
- Upload de code opnieuw naar de Arduino
- Tik een RFID/NFC-tag op de RFID-RC522-module
- U ziet dat de servo motor naar 90° draait
- Bekijk de output in de Seriële Monitor
- Tik opnieuw op dezelfde RFID/NFC-tag op de RFID-RC522-module
- U ziet dat de servo motor terug draait naar 0°
- Bekijk de output in de Seriële Monitor
- Tik met een andere RFID/NFC-tag op de RFID-RC522-module
- Bekijk de output in de Seriële Monitor
Video Tutorial
We overwegen het maken van videotutorials. Als u videotutorials belangrijk vindt, abonneer u dan op ons YouTube-kanaal om ons te motiveren de video's te maken.
Bekijk onze video-tutorial voor een visuele begeleiding bij dit project! De video biedt extra inzichten en helpt bij het snel begrijpen van de implementatie.